MV-8600: 路面参照マーカー
このチュートリアルでは、シングルタイヤモデルにプランク路面を配置するために路面プロパティファイルと路面参照マーカーを変更する方法を学習します。
- 概要
-
路面参照マーカーは、MotionSolveが路面の位置と向きを評価するときに使用される座標系です。Auto Tireシステムのタッチメントにも含まれている路面参照マーカーを基準にして路面ファイルが評価されます。
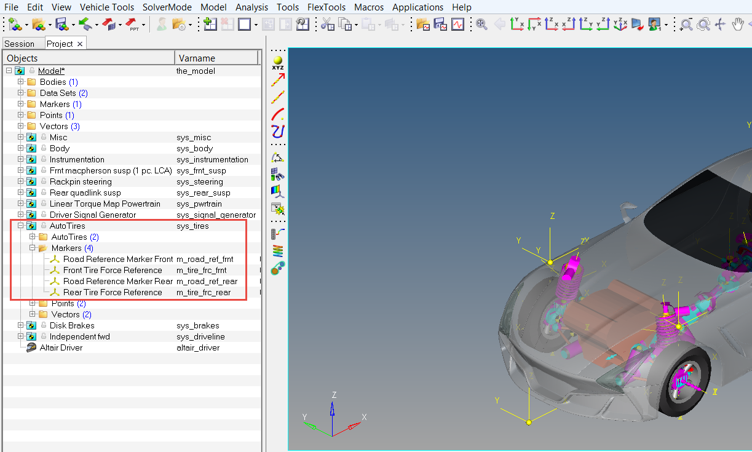
図 1. - 路面参照マーカー - TNOプランク路面モデル
-
TNOプランク路面は、路面参照マーカーのX軸に対して垂直方向にも斜め方向にも配置可能なシングルクリート(直方体の障害物)付きの平坦な路面で表現されます。
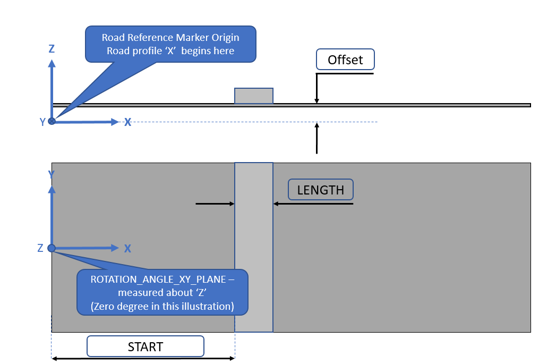
図 2. 路面参照マーカーによって方向付けられたプランク路面Offsetは、路面参照マーカーのZ軸を基準にした地面の距離です。Lengthは、X軸に沿ってプランクの幅を測定した値です。Rotation angle XY planeは、慣性フレームを基準にした路面の正のX軸です。STARTパラメータは、路面のX軸に沿った原点からプランクの始点までの距離を示します。
このチュートリアルでは、シングルタイヤモデルでプランク路面を配置するために路面プロパティファイルと路面参照マーカーを変更する方法を学習します。タイヤ力とタイヤパッチ位置の関係をプロットすることによって、シミュレーション結果におけるマーカーと路面プロパティの影響を理解します。
- 必要なファイル
- チュートリアルに必要なファイルを下の表に示します。mbd_modeling\road_markerフォルダーに配置された特定のファイルを自分の<作業ディレクトリ>にコピーします。
ファイル ファイルタイプ RoadRefMarker.mdl MDLファイル TNO_PlankRoad.rdf 路面プロパティファイル
MotionViewを開始してモデルを解析する
-
をクリックして、RoadRefMarker.mdlファイルを読み込みます。
図 3.
図 4. -
Openをクリックします。
モデルがMotionViewに表示されます。
図 5.路面参照マーカーがタイヤの接触パッチに配置されていることに注意してください。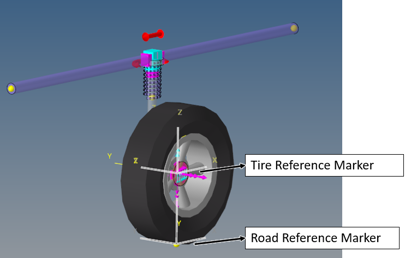
図 6. -
Auto Tireサブシステムには、路面プロパティファイルとしてTNO_PlankRoad.rdfが付属しています。

図 7. -
下の図は、路面プロパティファイルで使用可能なパラメータを示しています。
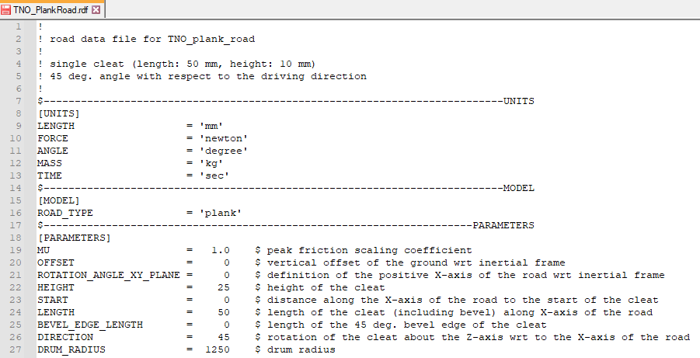
図 8.パラメータ 説明 HEIGHT クリートの高さ。 START 原点からクリートの始点までの道路のX軸に沿った距離(つまり、タイヤがSTARTでクリートに衝突するまでの原点からの移動量)。 LENGTH 道路のX軸に沿ったクリート(ベベルを含む)の長さ。 BEVEL_EDGE_LENGTH クリートの45度ベベルエッジの長さ。 DIRECTION 道路のY軸を基準としたZ軸の周りのクリートの回転。クリートが横向きになっている場合は、DIRECTION = 0です。クリートがX軸に沿っている場合は、DIRECTION = 90です。 注: 追加情報については、TNO MF-SWIFT/MF-Tyre Documentationをご参照ください。
路面ファイルでSTARTパラメータを変更して結果を確認する
-
TNO_PlankRoad.rdfファイルでSTARTパラメータを4000に変更します。
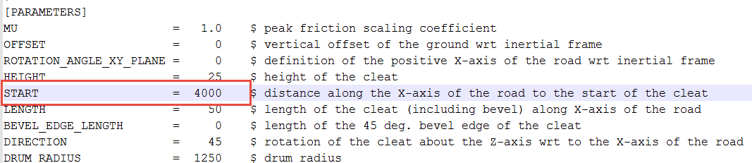
図 9. -
Model-Mainツールバーで、Run
 アイコンをクリックしてRun Solverパネルを開きます。
アイコンをクリックしてRun Solverパネルを開きます。
-
現在のモデルを保存して実行するために必要なファイルパスを参照して特定します。

図 10. -
MotionSolveの実行が完了したら、Resultsをクリックします。
HyperViewを伴う新しいウィンドウが開いて、モデルのアニメーションを可視化できます。
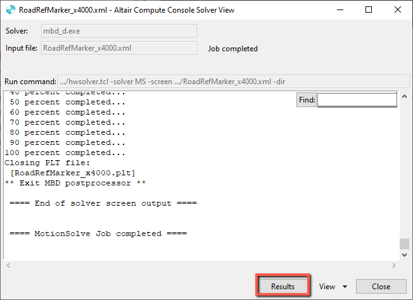
図 11. -
Client選択メニューからHyperGraph 2Dセッションを開きます(下の図を参照)。

図 12. -
Data fileブラウザを使用して、MotionSolveシミュレーションで保存された.pltファイルを探します。
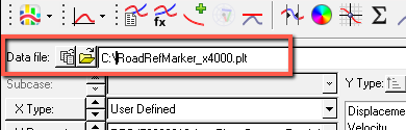
図 13. -
下の図に示すように以下のオプションを選択することによって、X軸を定義します。
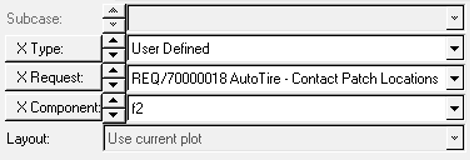
図 14.X Type User Defined X Request REQ/70000018 AutoTire- Contact Patch Locations X Component f2 -
以下のオプションを選択することによって、Y軸を定義します。

図 15.Y Type User Defined Y Request REQ/70000014 AutoTire- Tire CP Forces (W-Axis system) Y Component f4 -
Applyボタンをクリックして、以下のプロットを取得します。
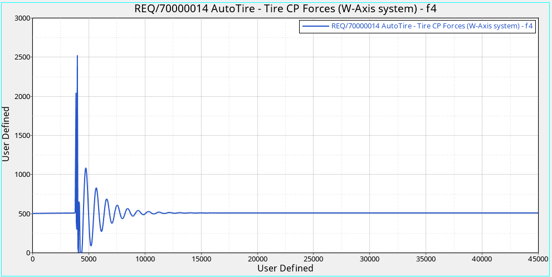
図 16.プロットには、タイヤ力(Y軸)と接触パッチ位置の関係が表示されます。カーブは、振動がX軸に沿って4000mmの位置で開始されることを示しています。これは、タイヤが4000mmの位置で障害物に到達することを意味します。
路面ファイルでSTARTパラメータを8000に変更して結果を確認する
-
TNO_PlankRoad.rdfファイルでSTARTパラメータを8000に変更します。
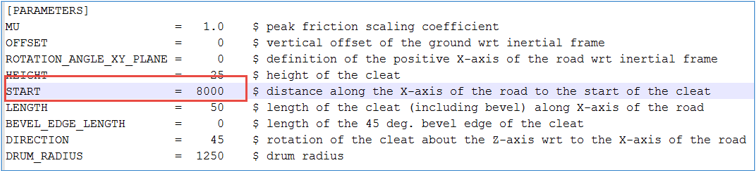
図 17. -
MotionViewのModel-Mainツールバーで、(Run)アイコンをクリックしてRun Solverパネルを開きます。
-
現在のモデルを保存して実行するために必要なファイルパスを参照して特定します。

図 18. -
同じHyperGraphセッションで、Data file欄内の新しい.pltファイルを探して参照します。

図 19. -
X軸とY軸の選択を繰り返します。
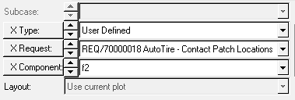
図 20.X Type User Defined X Request REQ/70000018 AutoTire- Contact Patch Locations X Component f2 
Y Type User Defined Y Request REQ/70000014 AutoTire- Tire CP Forces (W-Axis system) Y Component f4 -
Applyボタンをクリックして、オーバーレイされた2つのプロットを可視化します。
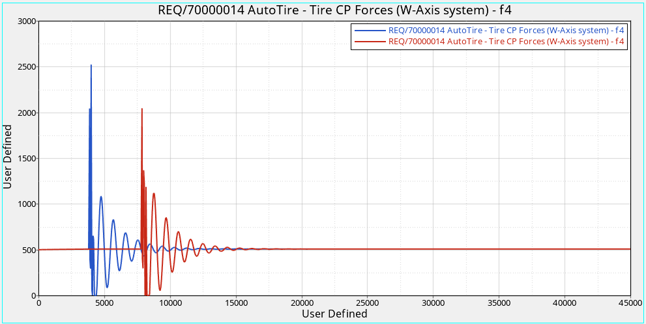
図 21.プロットには、路面プロパティファイル内のStartパラメータの違いが表示されます。青色のカーブは障害物がX軸に沿って4000mmの位置にある場合を示しているのに対して、赤色のカーブは障害物が8000mmの位置にある場合を示しています。
路面参照マーカー位置を変更して結果を確認する
-
ブラウザで、MotionViewモデルのMarker Road
Referenceをクリックします。
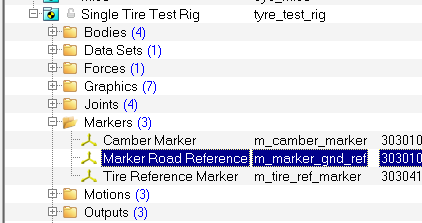
図 22. -
路面参照マーカーの原点にはGround reference点が使用されます。

図 23. -
ProjectブラウザからGround reference点をクリックします。
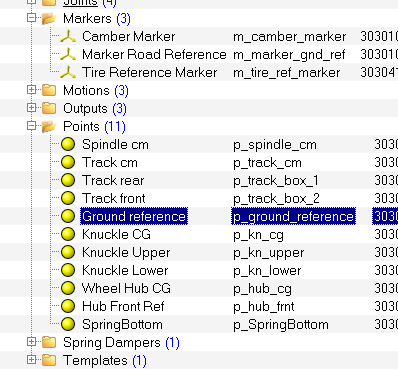
図 24. -
パネル領域で、X座標の値を4000に変更します。
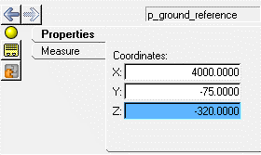
図 25. -
General Actionsツールバーで、(Run)アイコンをクリックしてRun Solverパネルを開きます。
-
Runボタンをクリックし、結果ファイルに別の名前を指定してシミュレーションを実行します。

図 26. -
HyperGraphセッションで、Data
file欄内の<作業ディレクトリ>からそれぞれのプロットファイルを探して参照します。

図 27. -
X軸とY軸の選択を繰り返します。
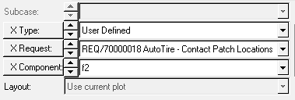
図 28.X Type User Defined X Request REQ/70000018 AutoTire- Contact Patch Locations X Component f2 
図 29.Y Type User Defined Y Request REQ/70000014 AutoTire- Tire CP Forces (W-Axis system) Y Component f4 -
Applyボタンをクリックして、オーバーレイされた3つのプロットを可視化します。
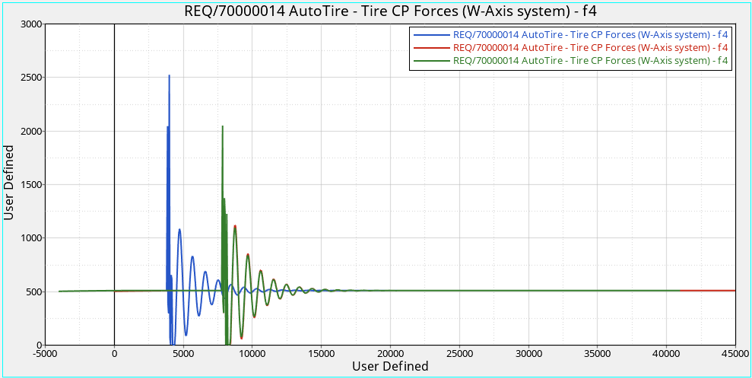
図 30.緑色のカーブは、Startを8000mmのままにして、路面参照マーカーを4000mmに変更した結果を示しています。プロットでは、ステップ3と同様に8000mmのX位置に障害物があるが、開始点のX位置は前回の0mmではなく-4000mmになっていることに注意してください。これに関する説明を下の図に示します。路面参照マーカーは路面の基準として機能します。マーカーの移動後は、接触パッチが基準の後ろに移動するため、負の値で開始されます。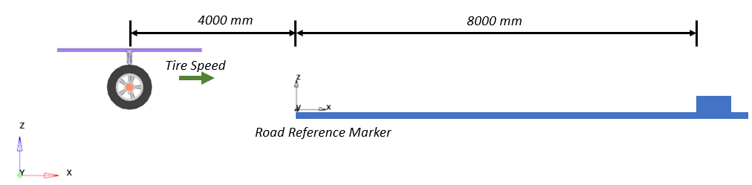
図 31.
Rotation Angle XY Planeを180に変更して結果を確認する
-
TNO_PlankRoad.rdfファイルでROTATION_ANGLE_XY_PLANEパラメータを180に変更します。
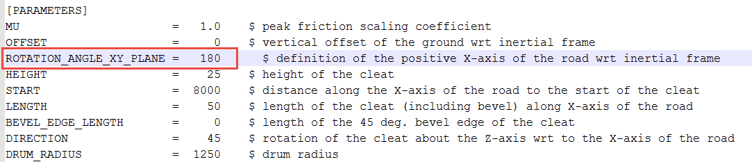
図 32. -
Runボタンをクリックし、結果に別の名前を指定してシミュレーションを実行します。

図 33. -
HyperGraphセッションで、Data
file欄内の<作業ディレクトリ>からそれぞれのプロットファイルを探して参照します。

図 34. -
X軸とY軸の選択を繰り返します。
図 35.X Type User Defined X Request REQ/70000018 AutoTire- Contact Patch Locations X Component f2
Y Type User Defined Y Request REQ/70000014 AutoTire- Tire CP Forces (W-Axis system) Y Component f4 -
Applyボタンをクリックして、オーバーレイされた4つのプロットを可視化します。
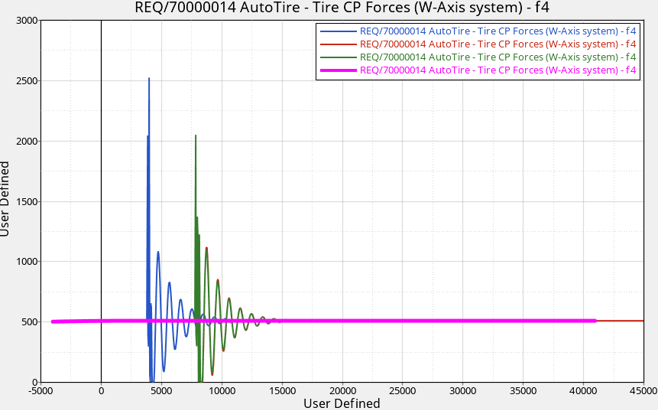
図 36.ピンク色のカーブは、路面プロパティファイルを180度回転させた結果を示しています。振動は発生しておらず、タイヤは障害物に到達していないことが観察されます。これに関する説明を下の図に示します。路面を回転させると、クリートはタイヤの後ろに位置し、タイヤ進行方向とは逆になります。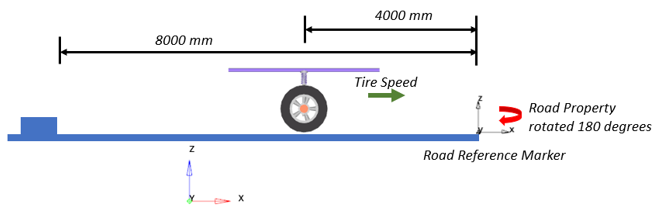
図 37.