MV-8004: n-Postイベント
このチュートリアルでは、セダン車モデルに4-Postイベントを追加して、MotionSolveでモデルを実行し、シミュレーション結果を表示する方法を学習します。
このチュートリアルの目的は、n-Postイベントを追加して、車両を加振するためのポスト入力信号を割り当て、結果をポスト処理するプロセスを示すことです。
n-Postイベントは、車両のライド性能を確認するためと1実機テスト情報との相関プロセスに使用されます。車両は、ホイールに取り付けられたポストによってテストリグ上に支持されます。加速度、変位、または力とモーメントで定義した入力信号によりポストが稼働し、車両の加振を励起します。
セダン車サンプルモデルとn-Postイベントの追加
-
MotionViewセッションで、メニューバーのをクリックして、Preferencesダイアログを開きます。
- MBD-Vehicle Dynamics Toolsを選択します。
- Loadをクリックします。
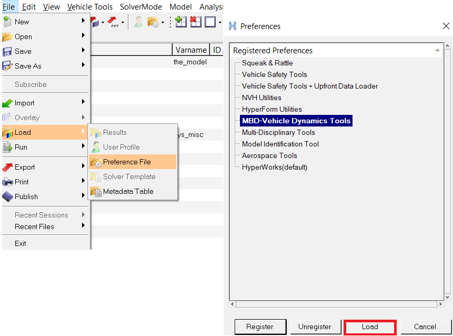
図 1. -
メニューバーで、をクリックします。
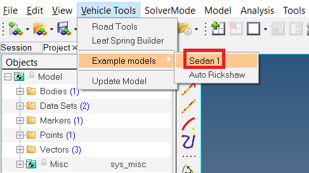
図 2.セダン車モデルがモデリングウィンドウに表示されます。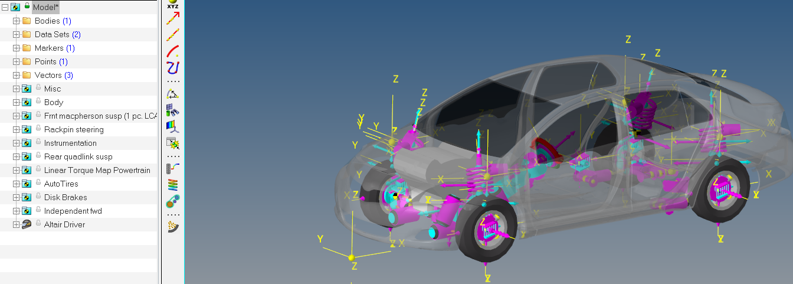
図 3. -
メニューバーで、を選択します。
- Add Eventsダイアログで、Typeドロップダウンメニューを使用して、 n-PostShakerオプションを選択します。
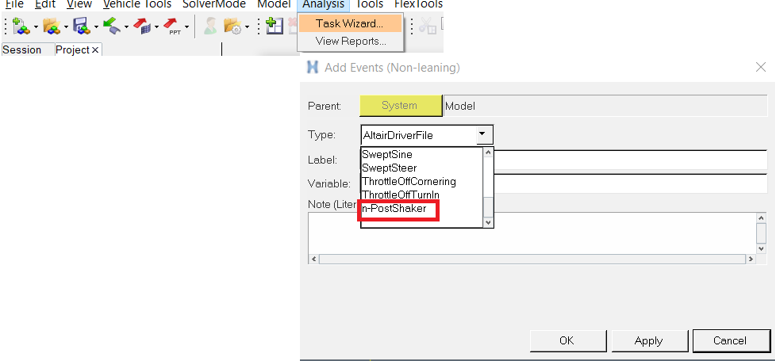 図 4. 注:
図 4. 注:- Add Eventsダイアログには、ブラウザでModelを右クリックして表示されるコンテキストメニューからもアクセスできます。
- n-Postイベント(またはその他のDriverイベント)を追加するには、モデル内にDriverシステムが必要です。
n-Post Shakerイベントがモデルに追加されます。 -
パネル領域で、車両の向きを確認します。

図 5.
n-Postイベントは、モデル内に各AutoTire/AutoTirePair用のポストを追加します。これらのポストは、車両の向きに応じて追加されます。イベントを追加する際に、AltairDriver Systemからの入力を元に、車両の向きを検出します。
AltairDriverで指定された向きに問題がなければ、n-Postの向きを変更する必要はありません。ただし、n-Postイベントの追加後に、車両の向きを変更する必要がある場合は、AltairDriverとn-Postイベントパネル内の向きも更新する必要があります。
Auto Tireを使用した連結 - スピンドル連結
このステップでは、スピンドル連結法を使用した場合のn-Postイベントの挙動を示します。
スピンドル連結: ホイールボディは、Inplaneジョイントを使用して、ホイール中心が地面に対して垂直な平面内に拘束されます。平ホイール中心でポストに制約されます。
-
パネルのWheel Postタブで、CouplingドロップダウンメニューからSpindleを選択します。
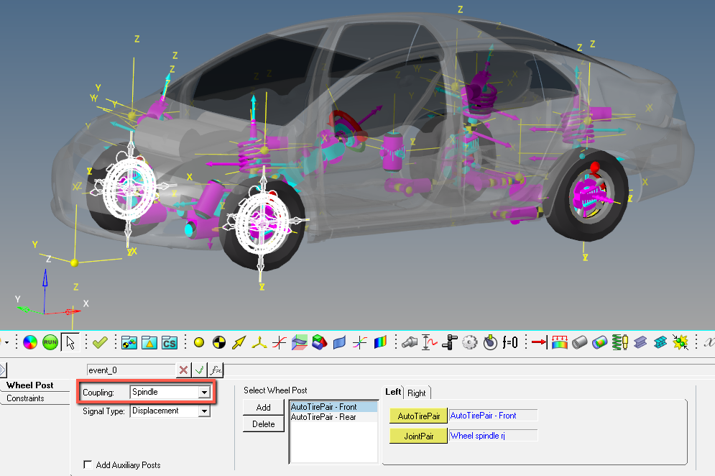 図 6.
図 6. -
n-Postイベントは、AutoTireペアを認識して、自動的にSelect Wheel Postセクションにエンティティを入力します。2つのAutoTireペアが含まれているかどうかとアタッチメントが定義されているかどうかを確認してください。
 図 7. 注:
図 7. 注:- ホイールポストは、Orientationジョイントによって地面と結合しています。
- ホイールボディは、Inplaneジョイントによってジャックボディに結合されます。
- ホイールボディのX方向とY方向は、BISTOP Force要素を使用して制限されます。
重要: ジョイント、ボディ、グラフィックス、ポイントなどのn-Postイベント経由で作成されたエンティティは編集できません。 -
Constraintsタブで、アタッチメントをチェックします。
 図 8. 強調表示されたアタッチメントは、n-Postイベントの静的シミュレーションと動的シミュレーションの間にドライバを補助するために必要です。車両の制約は、比較対象の実機テストのセットアップに基づいて決定できます。
図 8. 強調表示されたアタッチメントは、n-Postイベントの静的シミュレーションと動的シミュレーションの間にドライバを補助するために必要です。車両の制約は、比較対象の実機テストのセットアップに基づいて決定できます。- Steering Wheel Joint は、シミュレーション中にステアリングホイールの動きをロックするために使用します。
- Vehicle Yaw constraintとVehicle XY Planeの制約は、すべての車両イベントで静的ソリューション後の適切な車両姿勢を保証するために使用されるジョイントです。
-
Wheel Postタブで、Signal TypeドロップダウンメニューからDisplacementを選択します。
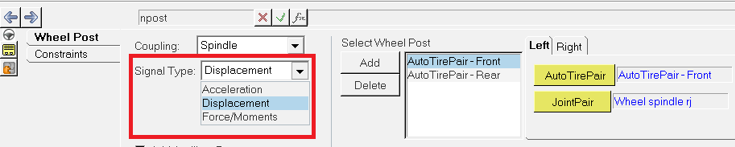 図 9. スピンドル連結配置への入力に使用可能な信号には次の3種類があります:
図 9. スピンドル連結配置への入力に使用可能な信号には次の3種類があります:- Displacement
- Acceleration: 加速度は変位に変換されます。Signal Managerは、加速度を速度に積分し、速度を変位に積分することによって変換を実行します。各ステップで、信号がバンドパスフィルタによって0.5Hz~1000Hzの範囲に制限されます。
- Fprce / Moment:
 図 10.
図 10. ‘Add Wheel Reaction Forces’オプションがオンになっている場合は、静的シミュレーション後にホイールでの反作用力が計算され、指定されたZ方向の力信号に加算されます。このフォース信号がホイールポストに適用され、これはn-Postシグナルマネージャーで確認できます。
-
Assign signalsをクリックして、n-Post Signal Managerにアクセスします。
 図 11.
図 11.
n-Post Signal Managerを使用した信号の割り当て
‘Drive File’ヘッダーの列にあるフォルダーのアイコンをクリックすることで、入力信号ファイルを選択します。サポートされているファイルフォーマットは、.csv、.dac、.rsp、および.rpcです。
-
n-Post Signal Managerで、AutoTirePair -
Frontを選択して、Drive File Zアイコンをクリックし、FL_disp.csvを選択します。
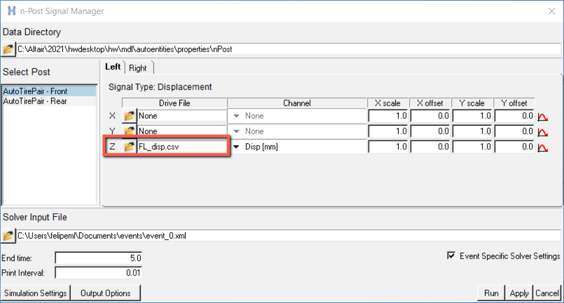
図 12. -
Plotアイコン
 をクリックして、スケールとオフセットが指定された信号を表示します。
をクリックして、スケールとオフセットが指定された信号を表示します。
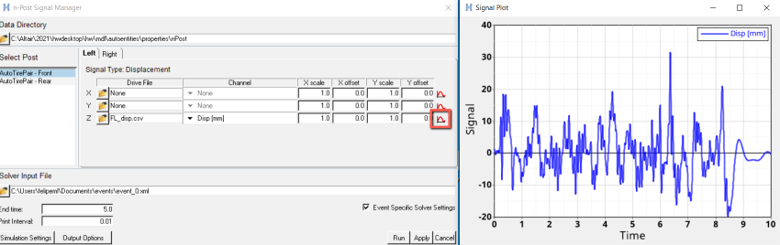
図 13. -
Rightタブをクリックして、Z signal欄にFR_disp.csvと入力します。
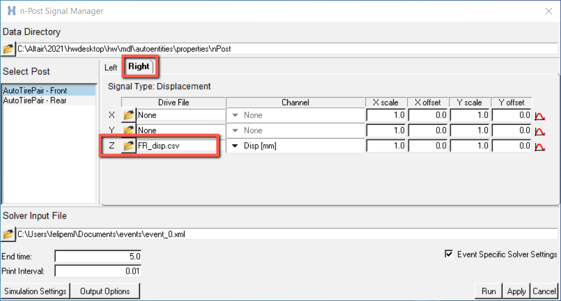
図 14.
n-PostShakerイベントの実行
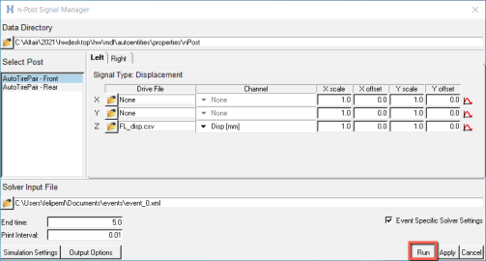
図 15.
- ApplyをクリックしてSignal Managerダイアログを閉じると、定義された構成が保存されます。
- イベントの実行は、ブラウザとMotionView Runパネルでn-PostShakerイベントを右クリックして表示されるコンテキストメニューからも可能です。
- AutoTireは、ソルバーデックをエクスポートする前に、非アクティブになります。AutoTireが最初から存在することによって、ドライバによるポスト数の決定が容易になります。
アニメーション表示とプロット
-
HyperViewでevent_0.h3dを読み込んで、シミュレーションをアニメーション表示します。
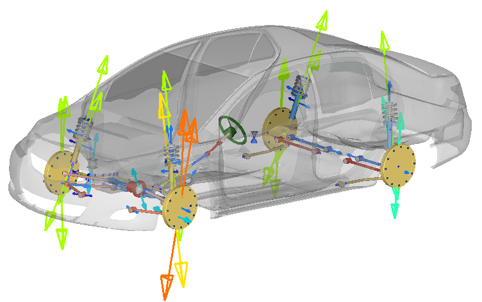 図 16.
図 16. -
HyperGraphでevent_0.abfを読み込んで、車両出力信号をプロットします。
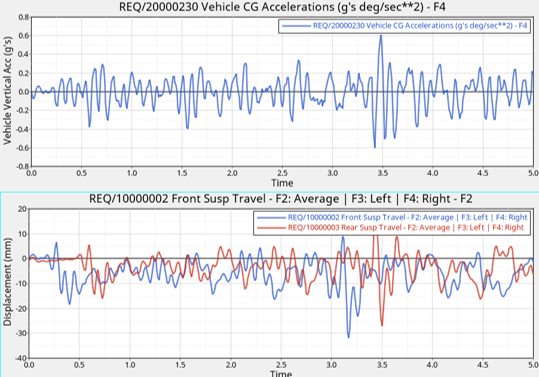 図 17. 注: n-Postイベントはレポート定義に関連付けられないため、このイベントに自動化レポートは使用できません。プロットセッションを使用して独自のレポートを作成できます。
図 17. 注: n-Postイベントはレポート定義に関連付けられないため、このイベントに自動化レポートは使用できません。プロットセッションを使用して独自のレポートを作成できます。
(オプション)Auto Tireを使用した連結 - タイヤ連結
タイヤ連結: タイヤを表現する線形剛性と減衰を通じてポストとホイールボディが結合します。タイヤモデル内のこの切り替えは、AutoTire内で発生します。
-
パネルのWheel Postタブで、CouplingドロップダウンメニューからTireを選択します。
n-Postイベントは、AutoTireペアを認識して、自動的にSelect Wheel Postセクションにエンティティを入力します。
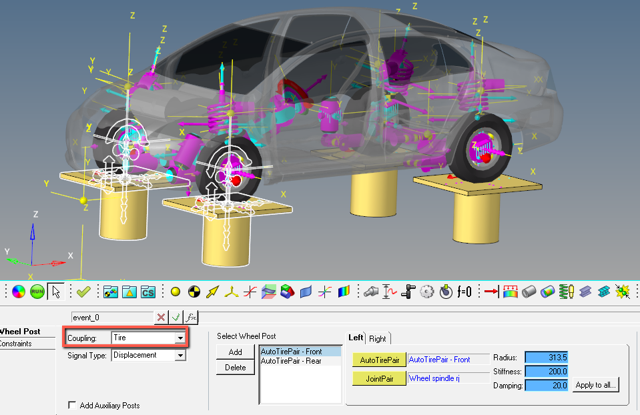 図 18.
図 18. - Radius、Stiffness、およびDampingに対して指定された新しい入力がパネルに表示されます。これらのパラメータは、指数値が1.0に設定されたIMPACT関数で線形レートスプリングを再現するために使用されます。この関数は、パラメータがプラグインされた以下の形式をとります。
`IMPACT( DZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), VZ({mrk_onWheel.idstring},{mrk_onJack.idstring},{mrk_onJack.idstring}), {ds_actData.real_tireRadius.value}, {ds_actData.real_tireStiffness.value}, 1.0, {ds_actData.real_tireDamping.value}, 0.001)`
 図 19.
図 19. - Radius、Stiffness、およびDampingに対して指定された新しい入力がパネルに表示されます。これらのパラメータは、指数値が1.0に設定されたIMPACT関数で線形レートスプリングを再現するために使用されます。この関数は、パラメータがプラグインされた以下の形式をとります。
-
Constraintsタブで、アタッチメントをチェックします。
タイヤ連結法での車両拘束は、スピンドル法と同じ目的で使用されます。
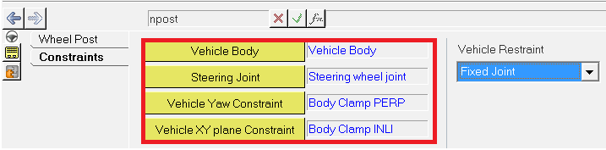 図 20.
図 20.
(オプション)補助ポストの追加
補助ポストは、空気力や横外乱などの路面以外の励振を含めるために使用できます。補助ポストは任意の場所に追加できるため、必要な数のポストをモデルに含めることができます。
-
パネルのWheel Postタブで、Add Auxiliary
Postsオプションチェックボックスをオンにします。
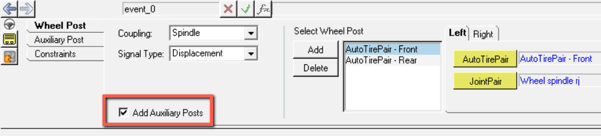 図 21.
図 21. -
Auxiliary Postタブで、Signal TypeドロップダウンメニューからForce/Momentを選択します。
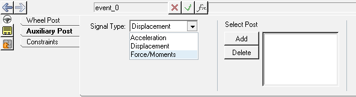 図 22.
図 22. -
Addをクリックして補助ポートを作成します。
 図 23.
図 23. -
Bodyに対してVehicle Bodyを、Apply at Pointに対してPoint_1を、Mount Pointに対してPoint_0を選択します。
 図 24. 各補助ポストのアタッチメントは、Body、Apply at Point、およびMounting Pointで構成されます。変位 / 力の適用方向は、Mount PointからApply at Pointに向かう方向です。
図 24. 各補助ポストのアタッチメントは、Body、Apply at Point、およびMounting Pointで構成されます。変位 / 力の適用方向は、Mount PointからApply at Pointに向かう方向です。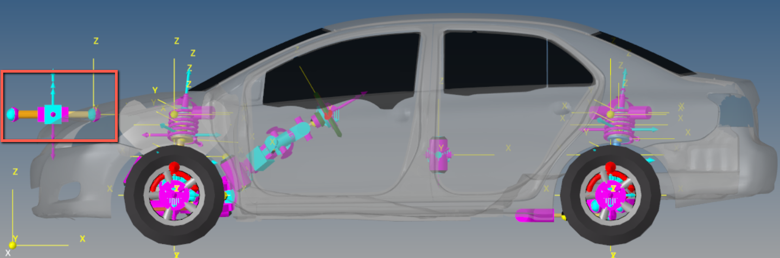 図 25. 注:
図 25. 注:- アクチュエータチューブボディとグラウンド間にボールジョイントが使用されます。
- アクチュエータロッドボディと車両アタッチメントボディの間にボールジョイントが使用されます。
- 単一方向の変位 / 加速度 / 力入力をガイドするためにアクチュエータチューブとロッドの間に並進ジョイントが使用されます。
-
Assign Signalをクリックします。
これで、作成された補助ポストがn-Post Signal Manager内のSelect postオプションの下に表示されます。
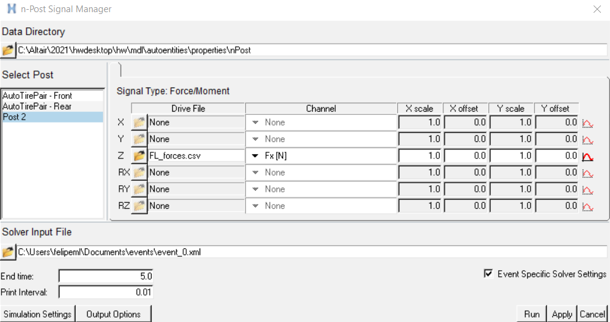 図 26.
図 26.