MV-8003:ギアおよびクラッチの制御
本チュートリアルでは、マニュアルトランスミッション車におけるギア-クラッチ制御のインターフェーシングを行う方法について学びます。
- ギア-クラッチコントローラー
- 回転速度ベースのシフトコントローラーは、回転速度がアップシフトRPMを上回るとアップシフトし、ダウンシフトRPMを下回るとダウンシフトします。ギアシフトコントローラーは、下の図に示すとおり、スロットルとクランチの信号も制御します。
-
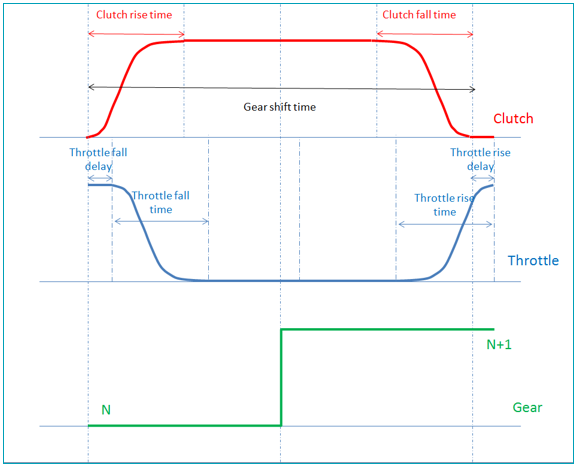 図 1.
図 1.
車両の組み立て
このステップでは、Assembly Wizardを使って車両を組み立てます。
-
Advanced DriverのすべてのMotionView機能が正しく動作するようMBD-Vehicle Dynamics Toolsプリファレンスファイルが読み込まれていることを確認してください。
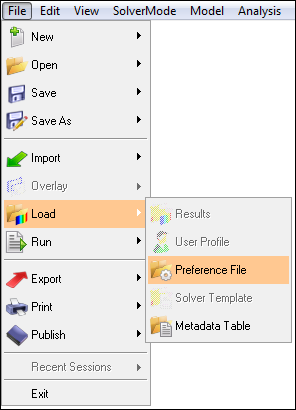 図 2.
図 2. 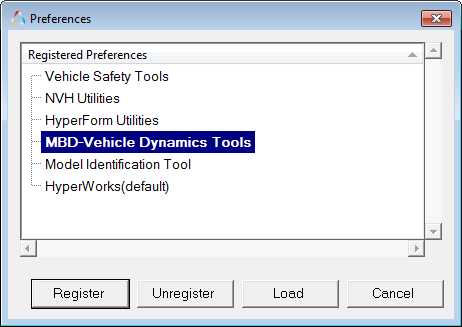 図 3.
図 3. -
メニューバーからを選択します。
開ループの加速イベントスクリプトの記述では、線形トルクマップパワートレインを使用して、ギアとクランチ用のコントローラーを使用しない単純なモデルとします。
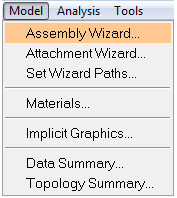 図 4.
図 4. -
Full vehicle with advanced driverオプションを選択します。
これで、Advanced Driverのすべての関連付けが管理されます。
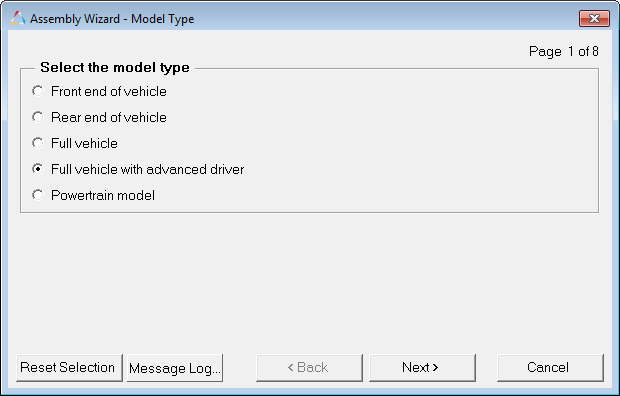 図 5.
図 5.
ドライバー解析の追加
このステップでは、Task Wizardを使って、ドライバー解析を読み込みます。
-
メニューバーからを選択します。
 図 6.
図 6. -
TypeドロップダウンメニューからAltairDriverFileを選択します。
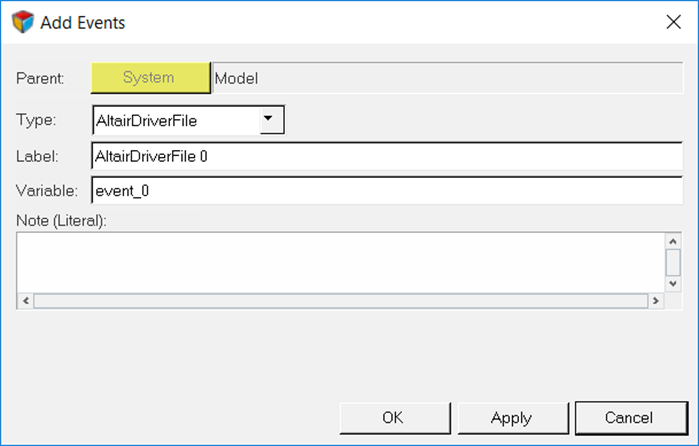
図 7.ヒント: (Altair Driverアイコン)を選択すると、Altair Driverパネルが開きます。これで自動的に、Altair Driverのための車両のアタッチメントがすべて関連付けされます。
(Altair Driverアイコン)を選択すると、Altair Driverパネルが開きます。これで自動的に、Altair Driverのための車両のアタッチメントがすべて関連付けされます。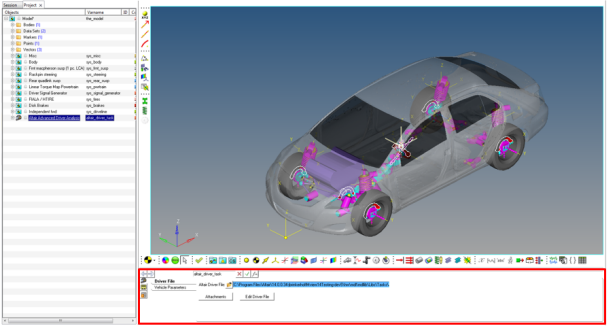 図 8.
図 8. AltairDriverFile 0を選択すると、ドライバーイベントのパネルが開きます。Event Editorボタンを選択し、Altair Driver Fileダイアログを開きます。
車両パラメータの指定
このステップでは、車両のパラメータを指定します。
車両のパラメータを指定します。
Altair Driver File運転イベントの書き出し
このステップでは、等速、定常円旋回イベント、 直線加速イベント、およびCartesian Coordinates of Centerline Pointsテーブルイベントとしての経路を作成します。
ギア-クラッチコントローラーでの速度のプロファイル追従
このステップでは、MV-8001:経路と速度の追従のCartesian Coordinates of Centerline Pointsテーブルイベントとしての経路用に書き出されたADFを修正し、ギア-クラッチコントローラーを含めます。
-
 をクリックし、シミュレーションを開始します。
をクリックし、シミュレーションを開始します。