MV-8002:複数の運転操作イベント
本チュートリアルでは、運転操作またはサブイベントの終了条件の定義、パラメトリックな式の書き出し、およびイベントの連続して実行される複数のサブイベントとしての定義を行う方法について学びます。
- 終了条件
- 指定のシミュレーション終了時刻の前に特定の運転操作を終了する条件
- 複数の運転操作イベント
- 2つ以上の運転操作から成るイベント – これらの運転操作は連続して実行される
- パラメトリックな式
- 複数の運転操作イベントでは、信号の連続性を保つために、運転操作の開始に先駆けて、式を再評価する必要がある
- { 波括弧(中括弧)内の式 }
- MotionSolveに渡される前に式を評価するようドライバーに指示
- {SIGNAL}
- VARVAL(信号ソルバー変数ID)として評価される
- {SIGNAL_0}
- 最後の運転操作の終了時における信号値として評価される
- {%SIGNAL}
- {SIGNAL} – {SIGNAL_0} として評価される
例:
スロットルオフでのコーナリングのイベント
- 運転操作1
- 定常円旋回、ロール角が最大値に達して安定するまで、一定速度で一定半径の経路を追従
- 運転操作2
- 同じ経路を追従している間にスロットルをステップダウン
このイベントでは、運転操作1は閉ループのステアリングとスロットルコントローラーで構成されます。運転操作 2では、ステアリングコントローラーは同じに留まりますが、スロットルコントローラーは開ループで、式 –‘STEP(TIME – end time of maneuver 1 , 0, throttle value at the end of maneuver 1, 0.5, 0)’を入力します。
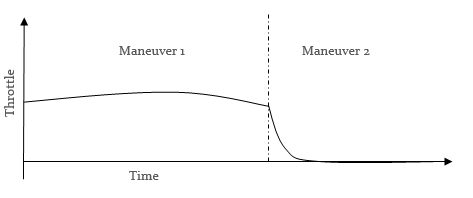 図 1.
図 1. 車両の組み立て
MV-8000のStep 1の指示に従って、以下のトポロジーの車両を生成します:
| ページ | ラベル | 選択 | デフォルト(Yes/No) |
|---|---|---|---|
| 1 | Model type | Full vehicle with advanced driver | No |
| 2 | Driveline configuration | Front wheel drive | Yes |
| 3 | 車体 | Body | Yes |
| 3 | Front suspension | Frnt macpherson susp (1 pc. LCA) | Yes |
| 3 | Steering linkages | Rackpin steering | Yes |
| 3 | Rear subframe | None | Yes |
| 3 | Rear suspension | Rear quadlink susp | Yes |
| 3 | Powertrain | Linear torque map powertrain | Yes |
| 3 | Signal generator | Driver signal generator | Yes |
| 3 | Tires | FIALA | Yes |
| 4 | Steering column | Steering column 1 (not for Abaqus) | Yes |
| 4 | Steering boost | None | Yes |
| 5 | Front struts | Frnt strut (with inline jts) | Yes |
| 5 | Front stabilizer bars | Frnt stabar with links | No |
| 5 | Rear struts | Rear strut (with inline jts) | Yes |
| 5 | Rear stabilizer bars | Rear stabar with links | No |
| 6 | Front jounce bumpers | None | Yes |
| 6 | Front rebound bumpers | None | Yes |
| 6 | Rear jounce bumpers | None | Yes |
| 6 | Rear rebound bumpers | None | Yes |
| 7 | Disk brakes | Disk brakes | Yes |
| 7 | Front driveline | Independent fwd | Yes |
| 8 | Next | No | |
| 9 | Finish | No |
ドライバー解析の追加
Task Wizardを使って、ドライバー解析を読み込みます。
 図 2.
図 2.
図 2. 車両パラメータの指定
このステップでは、車両のパラメータを指定します。
車両のパラメータを指定します。
Altair Driver File(ADF)運転イベントの書き出し
フィッシュフックイベント
このイベントを3つの運転操作でモデル化します。
-
シミュレーション
 を実行します。
を実行します。
-
結果を検証します。
運転操作 2は、ロール変化率が0.5秒の間、一貫して0 (表記のトレランスで)であると停止します。
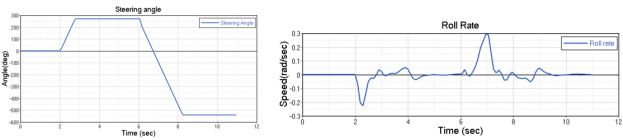 図 3.
図 3.