演習2:エラストマーの引張試験
本演習では、ゴム片(2mmx25mmx50mm)の単軸引張試験を実行します。
超弾性材料の定数値は、参考資料[3]から読み込まれています。
超弾性材料は、金属と比べてひずみが大きい材料です。超弾性材料の場合、応力とひずみの間の非線形関係は、ひずみエネルギー密度関数から得られます。MotionSolveで現時点でサポートする超弾性材料モデルは以下の3つです:Neo-Hookean、Mooney–Rivlin、Yeoh。
新規の材料プロパティの追加
このステップでは、新しい材料プロパティを追加します。
-
Add ボタンをクリックします。
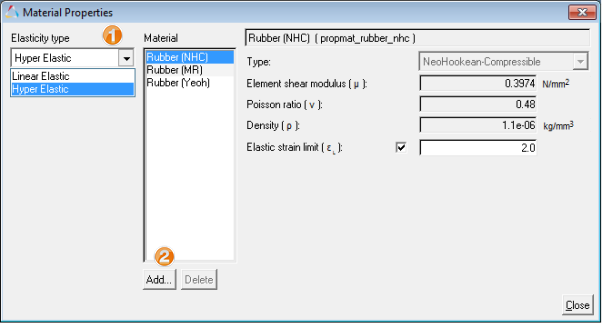
図 1. 新規HyperElastic材料の追加 -
Source for valuesにRubber (Yeoh)を選択します。
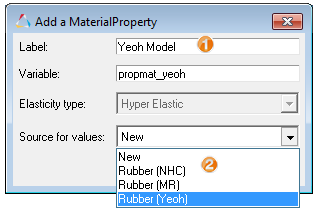
図 2. 新規材料のソース値の選択 -
Material Propertiesダイアログで、材料の定数値を指定します。
-
Element shear modulus (c10):
0.545235 -
Element shear modulus (c20):
0.0610498 -
Element shear modulus (c30):
-0.000802537 -
Poisson ratio (
 ):
):0.48 -
Density (
 ):
):1.1e-6 -
Elastic strain limit (εL):
2.0
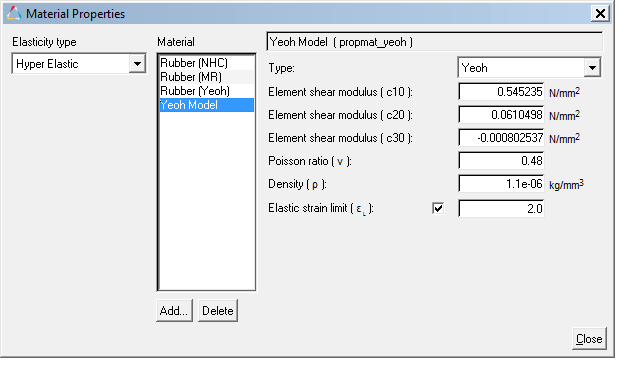
図 3. 材料定数値の指定 -
Element shear modulus (c10):
ゴム片のモデル化
このステップでは、引張試験のためゴム片をモデル化します。
-
 (Create Points Along A Vector)マクロを使って、Rubber End 1とRubber end 2の間に9つの中間ポイントを作成します。
(Create Points Along A Vector)マクロを使って、Rubber End 1とRubber end 2の間に9つの中間ポイントを作成します。

図 4. “Create Points along a Vector”マクロを使った中間ポイントの作成 -
Model-Referenceツールバーで、
 (Body)アイコンを右クリックします。
(Body)アイコンを右クリックします。
-
Propertiesタブを設定します。
- TypeをBeamに指定します。
- Cross-sectionをBarに指定します。
-
dim1に
2と入力します。 -
dim2に
25と入力します。 - Material Propertyに、作成済みのYeoh Modelを選択します。

図 5. ビームプロパティの指定 -
Connectivityタブを設定します。
-
1つ目の
 をアクティブにし、ポイントRubber End 1を選択します。
をアクティブにし、ポイントRubber End 1を選択します。
-
次に利用可能な中間ポイントを順に別のコレクターに選択し、最後のコレクターがRubber End 2となるようにします。
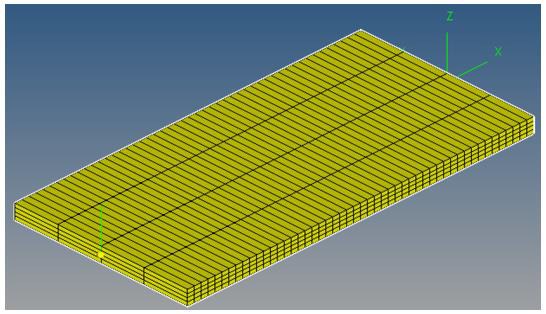
図 6. ゴム片モデル
-
1つ目の
制約の追加
このステップでは、ゴム片モデルに制約を作成します。
-
強制運動についてPropertiesタブで、Define byにExpressionを選択します。Expression欄に
`15*time`と入力します。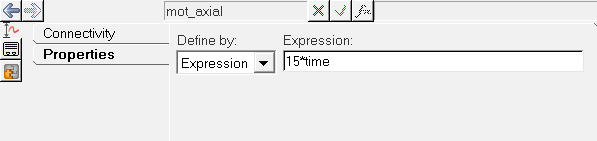
図 7. 強制運動の式 -
Standardツールバーで
 (Save model)をクリックし、モデルを
(Save model)をクリックし、モデルをrubber_strip.mdlとして、自身の<作業ディレクトリ>に保存します。
出力の追加
ここで、公称ひずみ値と公称応力値を求めるための出力を作成します。
公称ひずみ = 
公称応力 = 
-
 (Outputs)アイコンを右クリックします。
(Outputs)アイコンを右クリックします。
-
パネルで、F2に式
`(DM({j_trans.i.idstring},{j_fix.i.idstring})-50)/50`を入力します。F3に式`MOTION({mot_axial.idstring},{0},{2},{0})/50`を入力します。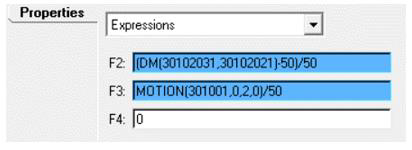
図 8. 出力リクエスト注: 式F2で、ソルバー関数DM()は、Translation JointのI マーカーとFix JointのI マーカーの間の距離の大きさを求めます。式F3は、強制運動Axial Motionによる反力を求めるソルバー関数MOTION()を使用します。
モデルの解析とポスト処理
-
 (Run)パネルアイコンをクリックします。
(Run)パネルアイコンをクリックします。
-
シミュレーションが完了したら、Animateをクリックし、HyperViewでアニメーションを確認します。
 (Start/Pause Animation)ボタンを使って、アニメーションを再生します。
(Start/Pause Animation)ボタンを使って、アニメーションを再生します。 -
ContourパネルでNLFE Stress (t), XXを選択し、適用(Apply)をクリックします。
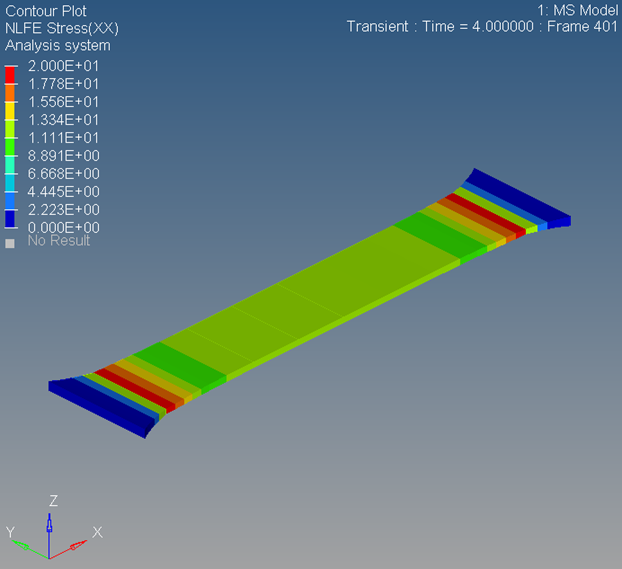
図 9. 応力コンター -
HyperGraphで表 4と表 5に示すデータを選択し、公称応力 vs 公称ひずみをプロットします。
表 4. X-Axis Data X Type Expression X Request REQ/70000000 Eng strain(F2), Eng Stress(F3) X Component F2 表 5. Y-Axis Data Y Type Expression Y Request REQ/70000000 Eng strain(F2), Eng Stress(F3) Y Component F3 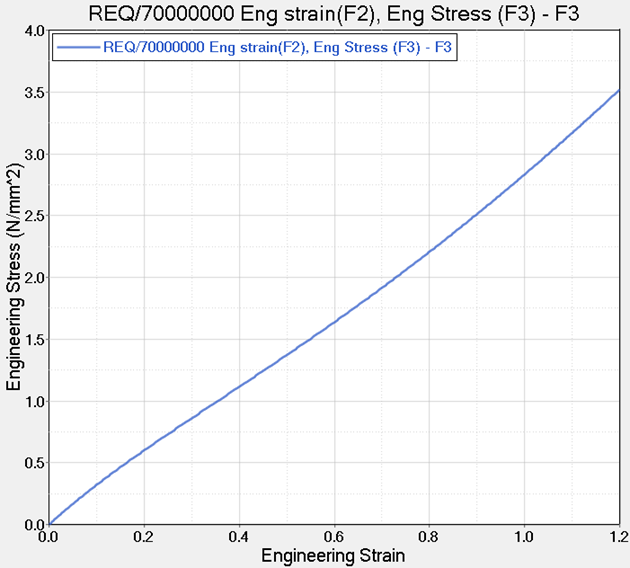
図 10. 応力 vs ひずみカーブ注: アニメーションは、断面変形による真応力を示しています。 -
をクリックしてモデルを保存します。
-
 をクリックし、セッションを
をクリックし、セッションをhyperelastic.mvwとして保存します。
参考資料
JUSSI T, SOPANEN and AKI M. MIKKOLA:
Description of Elastic Forces in Absolute Nodal Coordinate Formulation.Journal of Nonlinear Dynamics 34: 53– 74, 2003.
Oleg Dmitrochenko:
Finite elements using absolute nodal coordinates for large deformation flexible multibody dynamics.Proceedings of the Third International Conference on Advanced Computational Methods in Engineering (ACOMEN 2005).
Sung Pil Jung, TaeWon Park, Won Sun Chung:
Dynamic analysis of rubber like material using absolute nodal coordinate formulation based on the non-linear constitutive law.Journal of Nonlinear Dyn (2011) 63: 149–157.