円筒ジョイント(/CYL_JOINT)
円筒ジョイントは2つのセカンダリ節点で1つの特定の方向が定義されることを除き、剛体と同様です。全ての節点はこの方向には自由に移動でき、その軸周りの回転が自由です。
この特定の方向を定義する最初の2つの節点を含め全てのセカンダリ節点に運動条件が適用されます。メイン節点は使用されません。
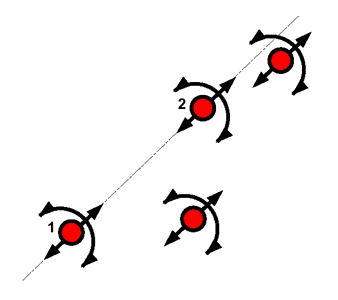
図 1. 円筒ジョイント
図 1. 円筒ジョイント
初期の状態で全てのセカンダリ節点が整列している場合、常にその整列状態を保ちます。図 1に示されているように、回転自由度はそれぞれの節点での局所回転のことであり、軸1-2周りの全体の回転ではありません。したがって、円筒ジョイントは1の節点に用いることが推奨されます。
図 2. ドアヒンジの例
図 2. ドアヒンジの例
図 2 は、円筒ジョイントを用いてどのようにヒンジがモデル化されるかの例です。円筒ジョイントは節点2、5、3、4から構成されます。ヒンジのモデル化では、現実的な回転を得るためには節点を整列させる必要があります。このため、ビームまたはその他の有限要素を使用して、節点1-2、2-5、4-3、および3-6が結合されています。最後に、結合を改善するために、非線形弾性スプリングを使用して節点2-3をリンクします。
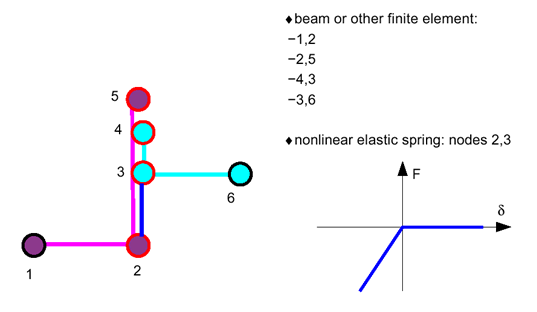
図 3. ヒンジのモデル化
図 3. ヒンジのモデル化