タイド接触(/INTER/TYPE2)
インターフェースタイプ2は、タイドインターフェースとも呼ばれ、セカンダリ節点とメインサーフェスを剛に結合する節点拘束です。セカンダリ節点の力とモーメントはメイン節点に伝達され、セカンダリ節点はメイン節点の移動に伴い、運動学的に位置が決められます。
このインターフェースは完全な力とモーメントのつり合いが保証されます。
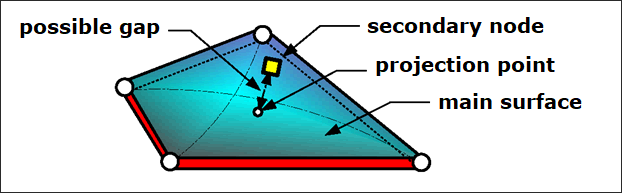
図 1. インターフェース2 - タイド
図 1. インターフェース2 - タイド
この結合を記述する4つの定式化が利用可能です。
- デフォルトのスポット溶接の定式化
- 最適化されたスポット溶接の定式化
- 破壊を伴う定式化
- ペナルティ定式化
デフォルトのスポット溶接の定式化
Spotflag=0
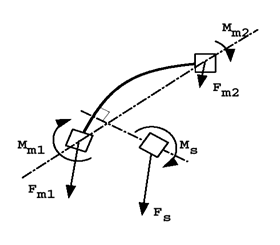
図 2.
図 2.
フラグが0にセットされた時、spotflag定式化はデフォルトの定式化になります:
- 要素の形状関数に基づく
- 低減積分要素ではアワグラスを生成する
- セカンダリ節点の局所化の結合剛性関数を与える
- 完全積分シェル(メイン)での利用を推奨
- ソリッドのセカンダリ節点とソリッドのメインセグメントとの結合に推奨(回転自由度のないメッシュの遷移)
最適化されたスポット溶接の定式化
Spotflag=1
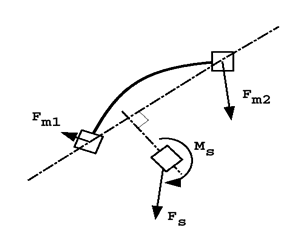
図 3.
図 3.
フラグが1にセットされた時、spotflag定式化は最適化された定式化になります:
- 要素の平均剛体移動に基づく
- アワグラスの問題なし
- 一定の結合剛性
- 低減積分シェル(メイン)での利用を推奨
- ビーム、スプリング、シェルのセカンダリ節点のソリッドのメイン節点への結合に推奨
破壊を伴う定式化
Spotflag=20、21および22
これらのオプションを使用して、以下の2つの破壊基準を定義できます:
- Rupt = 0(独立破断パラメータ):
- Max_N_DistまたはMax_T_Distに達したときに破壊が生じる(デフォルト)
- Rupt= 1(連成破断パラメータ):
- 右記の場合、破壊;
計算時には、直応力、せん断応力、法線変位および接線変位が求められ、インターフェースで定義されている最大値と比較されます。最大基準に達すると直ちに、直応力とせん断応力が0に設定されます。
ペナルティ定式化
Spotflag=25
ペナルティ法を使用するインターフェースタイプ2の主な目的は、運動学的拘束なしでセカンダリ節点をメインセグメントに固定させることです。ペナルティ法を使用することにより、
“運動条件の非適合”を回避できる可能性があります。.