剛体(/RBODY)
剛体はセカンダリ節点のセットとメイン節点で定義されます。これは無限剛性のパートと比較することができます。セカンダリ節点間の相対変位は許されず、剛体の全体の移動はメイン節点に支配されます。
それぞれのセカンダリ節点には全ての方向に運動条件が与えられ、他の節点拘束は許されません。しかしながら、Lagrange乗数法の場合には、運動条件の非適合が無い場合には解を見つけることができます。
- ケース 1:
- 重心はセカンダリとメイン節点の質量と座標から計算
- ケース 2:
- 重心はセカンダリ節点の質量と座標のみから計算
- ケース 3:
- 重心はメイン節点の座標にセット
- ケース 4:
- 重心はメイン節点の座標にセット
メイン節点には、Radioss Starterがメイン節点を移動させることもあるため、(要素の一部でなく)人工的な節点を用いることを強く推奨します。ICoGフラグが3または4に設定されていない限り、メイン節点はRadioss Starterにより重心に移動されます。最も現実的な挙動を得るために、ICoGは2に設定することが推奨されます。この場合、重心はセカンダリ節点のみを考慮して計算されます。ICoGが1に設定された場合は、重心の計算にメイン節点自身の質量が含まれます。
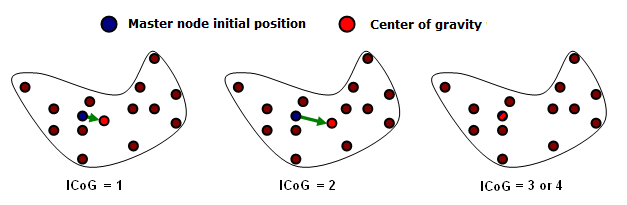
図 1. 重心計算
- 剛体が有限要素モデルの一部をカバーし、シェル、ソリッドまたは他の要素を含む場合:このケースでは、セカンダリ節点の質量が剛体の全質量を与え、付加的な質量は必要ありません。メイン節点はどこに位置していても構いません。質量中心に移動されます。この種類の剛体では、CPU時間を大幅に節約できます。
- 剛体が構造節点に結合されているモデル化されていないコンポーネントを表現している場合: このケースでは、いくつかのセカンダリ節点が剛体を有限要素モデルに結合するために用いられます。質量と慣性が付加され、メイン節点はコンポーネントの質量中心に配置されます。メイン節点は、Sekandari 節点の質量を考慮に入れ、僅かしか移動しません。あるケースでは、剛体を可視化するためまたは接触をシミュレートするためにダミーのメッシュが用いられます、しかし、ダミー要素の質量が小さければ、前の注釈はなお正しいことになります。
- 剛体が2つまたはそれ以上のパートの結合に用いられる場合: これらの剛体に対して付加質量は必要なく、メイン節点はどこにあっても構いません。これらの剛体に対しては球状慣性を用いる必要があります。これらの剛体は通常非常に小さく(4から8節点)、その慣性はしばしば、ある1方向に対しては非常に小さく1つの特定の方向に対しては非常に大きくなるためです。これは不安定を引き起こすことがあり、それ故球状慣性の使用を通して、慣性をどの方向に対しても同じにします。
アクティブ化 / 非アクティブ化
剛体は/SENSORまたはEngineのオプション/RBODY/ONまたは/RBODY/OFFでアクティブ化または非アクティブ化することができます。
- /RBODY/ON
- 1 2
- /RBODY/OFF
- 3
剛体移動
剛体のアクティブ化と非アクティブ化の主な使用法の1つは、ロールオーバーシュミレーションにおけるロールオーバー動作に関するものです。車両が自由に飛んでいる間、要素の変形は無視できます。飛んでいる間、構造全体を一時的に剛体に置き換えることができれば、CPU時間を大幅に節約できます。地面に接触する前に、剛体は非アクティブ化され、その後リバウンド後に再びアクティブ化されます。
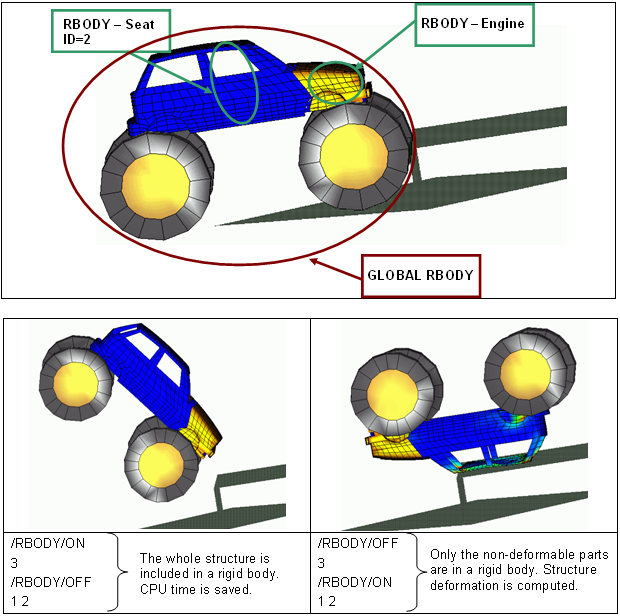
図 2. ロールオーバーの例題での剛体のアクティブ化 - 非アクティブ化
初期静的釣り合い
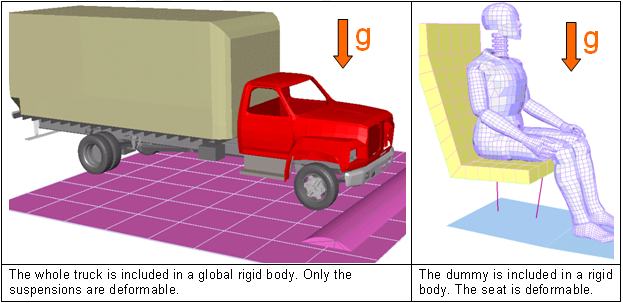
図 3. 静的釣り合いの例
剛体の統合(マージ)
/MERGE/RBODYオプションは、剛体の統合または既存の剛体へのセカンダリ節点の追加に用いることができます。定義されているセカンダリエンティティは、メイン剛体へのセカンダリとなります。セカンダリエンティティは、剛体、単一の節点、または節点のセットであることが可能です。/MERGE/RBODYで複数の行を定義することによって、複数のセカンダリエンティティを1つのメイン剛体に統合することができます。
メイン入力ファイルで統合を定義することで、2つの別々のインクルードファイルで定義された2つの異なるアセンブリを統合するという使い方もできます。これは、エンジンのような複雑なコンポーネントをモデル化するために、剛体として定義された別々のパートを1つの剛体に統合する必要がある場合にも役立ちます。
/MERGE/RBODYで定義されたメイン剛体は、別の/MERGE/RBODY内のセカンダリ剛体として定義できます。ただし、複雑な階層はデバッグが難しくなるので避けるべきです。セカンダリエンティティは、1つの/MERGE/RBODYでのみ定義でき、どの/RBODYでも定義できません。そうでない場合は、互換性のない運動条件が発生します。
マージの前に、各セカンダリおよびメイン剛体の慣性、質量、および重心が、それらの/RBODYプロパティに基づいて計算されます。次に、セカンダリエンティティがメインリジッドボディに統合され、/MERGE/RBODY Iflagオプションに基づいて新しい剛体のプロパティが計算されます。