/PROP/TYPE32 (SPR_PRE)
ブロックフォーマットのキーワード このプロパティは、シートベルトプリテンショナーのモデル化またはボルトへのプリテンションの付与に使用可能なプリテンションスプリングプロパティセットを記述します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE32/prop_ID/unit_IDまたは/PROP/SPR_PRE/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| M | sens_ID | Ilock | |||||||
| fct_ID1 | fct_ID2 | Ascale_2 | Ascale_1 | Fscale_F | |||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| M | スプリングの質量 (実数) |
|
| sens_ID | センサーの識別子 (整数) |
|
| Ilock | ロッキングフィーチャーフラグ
(整数) |
|
| センサーのアクティブ化前のスプリングの剛性、センサーのアクティブ化後の除荷剛性、およびスプリングがロックされた後のスプリング剛性。 (実数) |
||
| センサーアクティブ化時の力 (実数) |
||
| ピストンのスライド長 (実数) |
||
| センサーアクティブ化時の初期内力 (実数) |
||
| センサーアクティブ化後の載荷剛性 (実数) |
||
| fct_ID1 | センサーアクティブ化後の変位に対するプリテンション載荷力関数
。 (整数) |
|
| fct_ID2 | センサーアクティブ化後の時間に対するプリテンション載荷力関数
。 (整数) |
|
| Ascale_2 | fct_ID2の横軸(時間)に対するスケールファクター (実数)デフォルト値は1.0 |
|
| Ascale_1 | fct_ID1の横軸のスケールファクター (実数)デフォルト値は1.0 |
|
| Fscale_F | 関数fct_ID1およびfct_ID2の縦軸(力)に対するスケールファクター。 (実数)デフォルト値は1.0 |
例(プリテンション)
#RADIOSS STARTER
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#- 1. LOCAL_UNIT_SYSTEM:
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/UNIT/2
unit for prop
# MUNIT LUNIT TUNIT
kg m s
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/SPR_PRE/11/2
PRETENSIONNER
# M sensor_ID Ilock
.05 1 0
# Stif0 F1 D1 E1 Stif1
100000 0 .25 0 0
#funct_ID1 funct_ID2 Ascale_2 Ascale_1 Fscale_F
1 0 0 0 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/SENSOR/TIME/1
pretentionner
# Tdelay
0.1
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1
Loading force function vs displacement after sensor activation
# X Y
-1 0
-.1 95
0 100
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATAコメント
- プリテンション要素は2つの節点をもつ/SPRING要素です。これらは、シートベルトプリテンショナーのモデル化またはボルトへのプリテンションの付与に使用できます。
- プリテンション要素は、プリテンション力を生成するために移動するスライド長 のピストンとして可視化することが可能です。
- プリテンション要素力はセンサーのアクティブ化後に始まり、線形または非線形の力を使って定義できます:
- 線形モデルは以下のパラメータのうち2つを入力することによって定義されます;アクティブ化時の力(
)、ピストンスライド長(
)、初期内部エネルギー(
)、載荷剛性(
)
ほかの2つのパラメータは以下を用いて計算されます:
および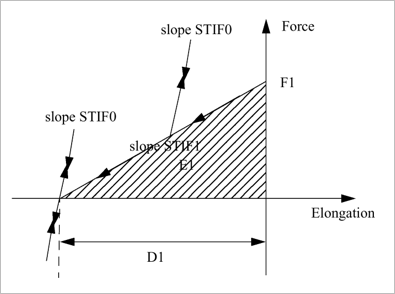
図 1. - 非線形モデルは、曲線を変位の関数fct_ID1として、または時間の関数fct_ID2として入力することで定義されます。これらの関数のいずれかを使用した場合、
、
および
の以前の入力は無視されます。fct_ID1関数とfct_ID2関数の両方を使用すると、fct_ID2関数はfct_ID1のスケーリング関数として機能します。プリテンション力は次のように計算されます:
(1) ここで、- センサーがアクティブになる時間。
- センサーをアクティブにする長さで、
- 線形モデルは以下のパラメータのうち2つを入力することによって定義されます;アクティブ化時の力(
)、ピストンスライド長(
)、初期内部エネルギー(
)、載荷剛性(
)
- スライド長 が定義されていると、プリテンション力はゼロにセットされ、スプリングはスライド長 分だけスプリングが短くなる際にロックされます。
- Ilock = 1の場合、スプリングは、スライド長 分だけスプリングが短くなる際、もしくは力の関数fct_ID1またはfct_ID2により定義されたとおりプリテンション力がゼロになるとロックされます:
- Ilock=2の場合、除荷後にスプリングがロックされます。力vs変位fct_ID1のロックの例。しかしながら力vs時間fct_ID2にも有効
-
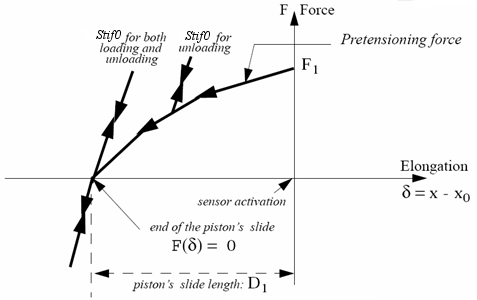
図 2. Ilock= 1スプリングは力 = 0の際にロック -
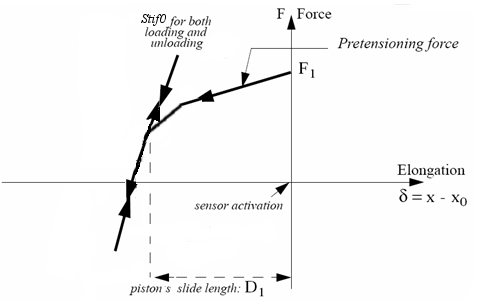
図 3. に達した際にスプリングはロック -
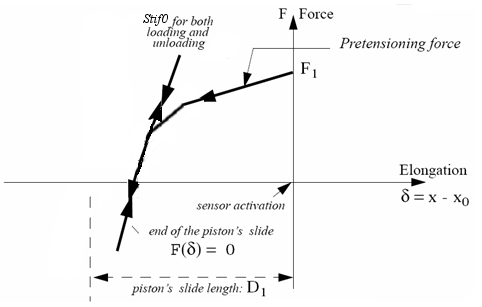
図 4. Ilock= 2、除荷のためにスプリングがロック
-
- スプリングがロックされた後、スプリング剛性は となります。
- プリテンションスプリングは、スプリングの長さがゼロに近づくと不安定になることがあります。
- /TH/SPRINGからの伸びの出力LX、LY、LZは、伸び速度です。
- ボルトのプリテンションに使用される場合:
- /PROP/SPR_BEAMでの重複スプリングは、自由度2 – 6のボルトのモデル化に使用されます。
- Ilock=1を使用します。また、プリテンションスプリングをロックする必要がある時点で力が0になる時間対力の関数fct_ID2を定義します。図 5では、t=5.5でスプリングがロックされます。
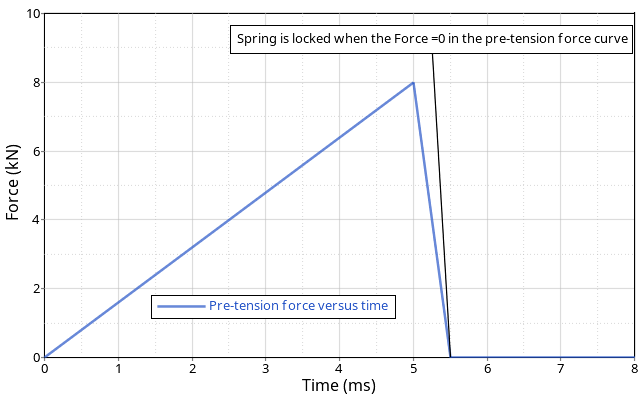
図 5.