/PROP/TYPE44 (SPR_CRUS)
ブロックフォーマットのキーワード これはクラッシャブルフレームの圧縮、引張り、ねじり、曲げの単純なマクロモデルを表現するスプリング要素です。
元は、この要素は PSA PEUGEOT CITROËNとの協力で開発されました。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE44/prop_ID/unit_IDまたは/PROP/SPR_CRUS/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass/ L | Inertia / L | Kinter | Skew_ID | Icoupling | Ifiltr | ||||
| K11L | K44L | K55L | K66L | Idamp | |||||
| K5bL | K6cL | ||||||||
| fct_X+i | fct_X-i | fct_X-r | Fscale_XY | ||||||
| fct_XX+i | fct_XX--i | fct_XX+r | fct_XX--r | Fscale_XXY | |||||
| fct_YY1+i | fct_YY1-i | fct_YY1+r | fct_YY1-r | Fscale_YY1Y | |||||
| fct_ZZ1+i | fct_ZZ1-i | fct_ZZ1+r | fct_ZZ1-r | Fscale_ZZ1Y | |||||
| fct_YY2+i | fct_YY2-i | fct_YY2+r | fct_YY2-r | Fscale_YY2Y | |||||
| fct_ZZ2+i | fct_ZZ2-i | fct_ZZ2+r | fct_ZZ2-r | Fscale_ZZ2Y | |||||
| X_lim_g | X_lim | XX_lim | |||||||
| YY1_lim | ZZ1_lim | YY2_lim | ZZ2_lim | ||||||
Idamp = 1の場合、
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| fct_D_x | Dscale_x | F_x | |||||||
| fct_D_y | Dscale_y | F_y | |||||||
| fct_D_z | Dscale_z | F_z | |||||||
| fct_D_xx | Dscale_xx | F_xx | |||||||
| fct_D_yy | Dscale_yy | F_yy | |||||||
| fct_D_zz | Dscale_zz | F_zz | |||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子。 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| Mass/ L | 単位長さあたりのフレーム質量 (実数) |
|
| Inertia / L | 単位長さあたりのフレーム慣性 (実数) |
|
| Kinter | 接触インターフェース剛性
2
(実数) |
|
| Skew_ID | スキュー座標系識別子。 (整数) |
|
| Icoupling | カップリングフラグ 3
(整数) |
|
| K11L | Lが掛けられる、引張 / 圧縮剛性 (実数) |
|
| K44L | Lが掛けられる、X軸周りのねじり剛性 (実数) |
|
| K55L | Lが掛けられる、Y軸周りの曲げ剛性 (実数) |
|
| K66L | Lが掛けられる、Z軸周りの曲げ剛性 (実数) |
|
| K5bL | Lが掛けられる、XY剛性軸のせん断曲げ (実数) |
|
| K6cL | Lが掛けられる、XZ剛性軸のせん断曲げ (実数) |
|
| fct_X+i | X方向のひずみに対する引張力の関数 (整数) |
|
| fct_X-i | X方向のひずみに対する初期圧縮力の関数要素の初期状態に用いられます。 4 (整数) |
|
| fct_X-r | X方向のひずみに対する残留圧縮力の関数要素の残留状態に用いられます。 4 (整数) |
|
| Fscale_XY | 引張り関数の縦軸のスケールファクタ デフォルト = 1(実数) |
|
| fct_XX+i | 正方向のねじれ角に対する初期ねじりモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_XX-i | 負方向のねじれ角に対する初期ねじりモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_XX+r | 正方向のねじれ角に対する残留ねじりモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| fct_XX-r | 負方向のねじれ角に対する残留ねじりモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| Fscale_XXY | モーメント関数の縦軸のスケールファクタ デフォルト = 1(実数) |
|
| fct_YY1+i | 節点1の正の方向の曲げ角度に対する初期Yモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_YY1-i | 節点1の負の方向の曲げ角度に対する初期 Yモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_YY1+r | 節点1の正の方向の曲げ角度に対する残留Yモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| fct_YY1-r | 節点1の負の方向の曲げ角度に対する残留Yモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| Fscale_YY1Y | 節点1の曲げYモーメント関数の縦軸のスケールファクター デフォルト = 1(実数) |
|
| fct_ZZ1+i | 節点1の正の方向の曲げ角度に対する初期Zモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_ZZ1-i | 節点1の負の方向の曲げ角度に対する初期Zモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_ZZ1+r | 節点1の正の方向の曲げ角度に対する残留Zモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| fct_ZZ1-r | 節点1の負の方向の曲げ角度に対する残留Zモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| Fscale_ZZ1Y | 節点1の曲げZモーメント関数の縦軸のスケールファクター デフォルト = 1(実数) |
|
| fct_YY2+i | 節点2の正の方向の曲げ角度に対する初期Yモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_YY2-i | 節点2の負の方向の曲げ角度に対する初期 Yモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_YY2+r | 節点2の正の方向の曲げ角度に対する残留Yモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| fct_YY2-r | 節点2の負の方向の曲げ角度に対する残留Yモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| Fscale_YY2Y | 節点2の曲げYモーメント関数の縦軸のスケールファクター デフォルト = 1(実数) |
|
| fct_ZZ2+i | 節点2の正の方向の曲げ角度に対する初期Zモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_ZZ2-i | 節点2の負の方向の曲げ角度に対する初期Zモーメントの関数要素の初期状態に用いられます。 (整数) |
|
| fct_ZZ2+r | 節点2の正の方向の曲げ角度に対する残留Zモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| fct_ZZ2-r | 節点2の負の方向の曲げ角度に対する残留Zモーメントの関数要素の残留状態に用いられます。 (整数) |
|
| Fscale_ZZ2Y | 節点2の曲げZモーメント関数の縦軸のスケールファクター デフォルト = 1(実数) |
|
| X_lim_g | X方向のその要素と隣接フレーム要素が初期状態から残留状態へ移行する全体ひずみこれはフレーム要素が完全に崩壊したことを示します。 (実数) |
|
| X_lim | 前と同じですが、X方向のひずみが限界を超えた時に移行します。 (実数) |
|
| XX_lim | 前と同じですが、XX方向(ねじり)のせん断ひずみが限界を超えた時に移行します。 (実数) |
|
| YY1_lim | 前と同じですが、節点1のYY方向のせん断ひずみが限界を超えた時に移行します。節点1を共有する要素で、その節点の全ての自由度が残留状態に移行します。 (実数) |
|
| ZZ1_lim | 前と同じですが、節点1のZZ方向のせん断ひずみが限界を超えた時に移行します。節点1を共有する要素で、その節点の全ての自由度が残留状態に移行します。 (実数) |
|
| YY2_lim | 前と同じですが、節点2のYY方向のせん断ひずみが限界を超えた時に移行します。節点2を共有する要素で、その節点の全ての自由度が残留状態に移行します。 (実数) |
|
| ZZ2_lim | 前と同じですが、節点2のZZ方向のせん断ひずみが限界を超えた時に移行します。節点2を共有する要素で、その節点の全ての自由度が残留状態に移行します。 (実数) |
|
| Ifiltr | ひずみ速度フィルタリングフラグ。
(整数) |
|
| Idamp | 減衰フラグ
(整数) |
|
| fct_D_x | X - DOFの減衰力-伸び速度曲線 | |
| fct_D_y | Y - DOFの減衰力-伸び速度曲線 | |
| fct_D_z | Z - DOFの減衰力-伸び速度曲線 | |
| fct_D_xx | XX - DOFの減衰力-伸び速度曲線 | |
| fct_D_yy | YY - DOFの減衰力-伸び速度曲線 | |
| fct_D_zz | ZZ - DOFの減衰力-伸び速度曲線 | |
| Dscale_x | X – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| Dscale_y | Y – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| Dscale_z | Z – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| Dscale_xx | XX – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| Dscale_yy | YY – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| Dscale_zz | ZZ – DOFの線形減衰または関数減衰スケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
または |
| F_x | X - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
|
| F_y | Y - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
|
| F_z | Z - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
|
| F_xx | XX - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
|
| F_yy | YY - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
|
| F_zz | ZZ - DOFの力-伸び速度曲線の横軸のスケールファクター デフォルト = 1(コメント10をご参照ください) (実数) |
例
この例では、剛性のほかに、引張、圧縮、ねじり、Y方向の曲げ、およびZ方向の曲げの荷重ケースを記述する関数も取り上げます。
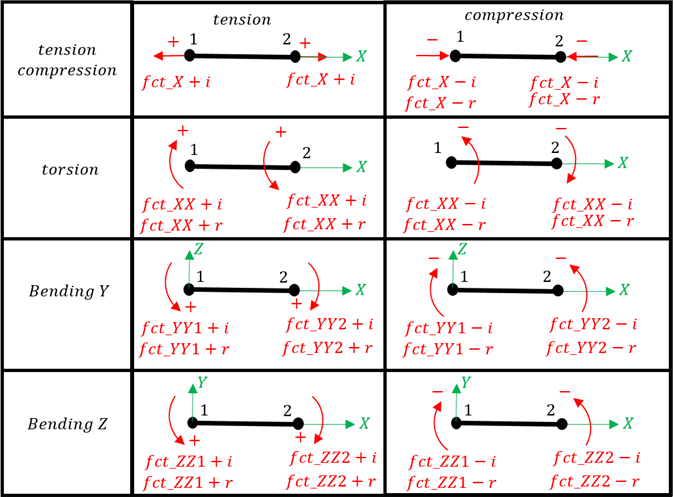
図 1.
図 1.
#RADIOSS STARTER
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#- 1. LOCAL_UNIT_SYSTEM:
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/UNIT/2
unit for prop
# MUNIT LUNIT TUNIT
g mm ms
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#- 2. GEOMETRICAL SETS:
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/TYPE44/2/2
prop44 example
# MASS/L INERTIA/L Kinter Skew_Id Icoupling Ifilter
.01267 52 0 0 0 0
# K11 K44 K55 K66 Idamp
341270000 645300000 17692570000 27269000000 0
# K5b K6c
200000000 300000000
#FUNCT_X+I FUNCT_X-I FUNCT_X-R FSCALE_XY
1000 1001 1002 0
#FUNCTXX+I FUNCTXX-I FUNCTXX+R FUNCTXX-R FSCALE_XXY
1010 1011 1012 1013 0
#FUNCYY1+I FUNCYY1-I FUNCYY1+R FUNCYY1-R FSCALEYY1Y
1020 1021 1022 1023 0
#FUNCZZ1+I FUNCZZ1-I FUNCZZ1+R FUNCZZ1-R FSCALEZZ1Y
1030 1031 1032 1033 0
#FUNCYY2+I FUNCYY2-I FUNCYY2+R FUNCYY2-R FSCALEYY2Y
1020 1021 1022 1023 0
#FUNCZZ2+I FUNCZZ2-I FUNCZZ2+R FUNCZZ2-R FSCALEZZ2Y
1030 1031 1032 1033 0
# X_lim_g X_lim XX_lim
-.709 -.0455 .34
# YY1_lim ZZ1_lim YY2_lim ZZ2_lim
.137 .1396 .138 .1393
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#- 3. FUNCTIONS:
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1000
fct_X+i (tension, initial state)
# X Y
-1 10000
0 10000
.0012 44500
1 44500
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1001
fct_X-i (compression, initial state)
# X Y
-.9 -71200
-.865 -45100
-.777 -27500
-.708 -14300
-.0488 -14200
-.0454 -14700
-.0299 -21300
-.0238 -39700
-.02 -44500
0 -38100
1 -38100
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1002
fct_X-r (compression, collapsed state)
# X Y
-.9 -71300
-.865 -45200
-.777 -27600
-.708 -14000
1 -14000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1010
fct_XX+i (initial state)
# X Y
-1 464000
0 464000
.12 486000
.16 479000
.19 453000
.34 193000
.8 70000
1.6 181000
3.3 84000
5 84000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1011
fct_XX-i (initial state)
# X Y
-5 -84000
-3.3 -84000
-1.6 -181000
-.8 -70000
-.34 -193000
-.19 -453000
-.16 -479000
-.12 -486000
0 -464000
1 -464000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1012
fct_XX+r (collapsed state)
# X Y
-1 193000
.34 193000
.8 70000
1.6 181000
3.3 84000
5 84000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1013
fct_XX-r (collapsed state)
# X Y
-5 -84000
-3.3 -84000
-1.6 -181000
-.8 -70000
-.34 -193000
1 -193000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1020
fct_YY1+i, fct_YY2+i (initial state)
# X Y
-1 800000
0 800000
.051 895000
.082 799000
.135 534000
.24 370000
.32 315000
1 315000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1021
fct_YY1-i, fct_YY2-i (initial state)
# X Y
-1 -315000
-.32 -315000
-.24 -370000
-.135 -534000
-.082 -799000
-.051 -895000
0 -800000
1 -800000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1022
fct_YY1+r, fct_YY2+r (collapsed state)
# X Y
-1 150000
-.9 150000
-.6 178000
-.45 250000
-.3 462000
-.2 663000
-.15 717000
-.1 674000
.135 534000
.24 370000
.32 315000
1 315000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1023
fct_YY1-r, fct_YY2-r (collapsed state)
# X Y
-1 -315000
-.32 -315000
-.24 -370000
-.135 -534000
.1 -674000
.15 -717000
.2 -663000
.3 -462000
.45 -250000
.6 -178000
.9 -150000
1 -150000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1030
fct_ZZ1+i, fct_ZZ2+i (initial state)
# X Y
-1 500000
0 500000
.0255 700000
.051 700000
.1395 380000
.3375 250000
1 250000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1031
fct_ZZ1-i, fct_ZZ2-i (initial state)
# X Y
-1 -250000
-.3375 -250000
-.1395 -380000
-.051 -700000
-.0255 -700000
0 -500000
1 -500000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1032
fct_ZZ1+r, fct_ZZ2+r (collapsed state)
# X Y
-1 110000
-.45 110000
-.15 442000
-.1 491000
-.05 478000
.1395 380000
.3375 250000
1 250000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1033
fct_ZZ1-r, fct_ZZ2-r (collapsed state)
# X Y
-1 -250000
-.3375 -250000
-.1395 -380000
.05 -478000
.1 -491000
.15 -442000
.45 -110000
1 -110000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#enddata
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|コメント
- このプロパティは2節点スプリング要素とリンクします。
- Kinterは、フレーム要素が接触で参照される時、インターフェース剛性の計算に用いられます。
- Icoupling =1の場合、力によって生成されるモーメントはそれぞれのフレーム要素の全体モーメントの釣り合いで計算されます(スプリング/PROP/TYPE8 (SPR_GENE)のIequil =1フラグと同様です)。
- クラッシャブルフレームの鎖の座屈挙動を再現するため、それぞれの要素は初期状態または残留状態(崩壊)のどちらかが仮定されます。初期では全てのクラッシャブルフレーム要素は初期状態で対応する“初期”の力ひずみ曲線が用いられます。ひずみが特定の要素でX_lim_gよりも大きくなった時、その要素は残留状態に移行します。その後、 この要素には“残留”力ひずみ曲線が全ての自由度で用いられます。同時に、情報は接続しているフレーム要素(左と右、TYPE44で定義されたもののみ)に送られ、これらの要素の両方の節点が残留状態に移行します。
- 値X_limかつ / またはXX_limに達した時、両方の要素の節点の全ての自由度が残留状態に移行します。隣接する要素も残留状態に移行します。
- 値YYi_limかつ / またはZZi_limに達した時、その節点につながる要素iの全ての自由度が残留状態に移行します。節点を共有する隣接要素も残留状態に移行します。
- 関数fct_X+iまたはfct_XX+iはフレーム要素の両方の節点にリンクします。
- スキューがプロパティに定義されている場合、Z方向は次のようになります:
(1) - プロパティセットでスキューフレームが割り当てられていない場合、Z方向は次のようになります:
(2) - 減衰関数が定義されている場合、減衰関数の式が線形減衰に代わって使用されます。
- 力の線形減衰:
- で、( - DOF)
- 力の関数減衰:
- で、( - DOF)