/PROP/TYPE33 (KJOINT)
ブロックフォーマットのキーワード ジョイントタイプのスプリングを記述します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE33/prop_ID/unit_IDまたは/PROP/KJOINT/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Type | Skflag | ||||||||
| skew_ID1 | skew_ID2 | Xk | Cr | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Krx | Kry | Krz | ||||||
| fct_IDXR | fct_IDYR | fct_IDZR | |||||||
| Crx | Cry | Crz | |||||||
| fct_IDXRC | fct_IDYRC | fct_IDZRC | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Krx | fct_IDXR | |||||||
| Crx | fct_IDXRC | ||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Ktx | Krx | fct_IDXT | fct_IDXR | |||||
| Ctx | Crx | fct_IDXTC | fct_IDXRC | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Kty | Ktz | fct_IDYT | fct_IDZT | |||||
| Krx | fct_IDXR | ||||||||
| Cty | Ctz | Crx | |||||||
| fct_IDYTC | fct_IDZTC | fct_IDXRC | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Kry | Krz | fct_IDYR | fct_IDZR | |||||
| Cry | Crz | fct_IDYRC | fct_IDZRC | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Ktx | fct_IDXT | |||||||
| Ctx | fct_IDXTC | ||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | Kty | Ktz | fct_IDYT | fct_IDZT | |||||
| Cty | Ctz | fct_IDYTC | fct_IDZTC | ||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kn | |||||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Ktx | Kty | Ktz | |||||||
| Krx | Kry | Krz | |||||||
| fct_IDXT | fct_IDYT | fct_IDZT | |||||||
| fct_IDXR | fct_IDYR | fct_IDZR | |||||||
| Ctx | Cty | Ctz | |||||||
| Crx | Cry | Crz | |||||||
| fct_IDXTC | fct_IDYTC | fct_IDZTC | |||||||
| fct_IDXRC | fct_IDYRC | fct_IDZRC | |||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| Type | ジョイントのタイプ。
(整数) |
|
| Skflag | スキューフレーム選択 10
(整数) |
|
| skew_ID1 | 1つ目のスキューシステムの識別子 (整数) |
|
| skew_ID2 | 2つ目のスキューシステムの識別子 (整数) |
|
| Xk | インターフェースの剛性 (実数) |
|
| Cr | 臨界減衰係数 デフォルト = 0.0(実数) |
|
| Kn | 固定自由度の剛性 (実数) |
|
| Krx | X回転剛性関数 12 デフォルト = 1.0(実数) |
|
| Kry | Y回転剛性関数 12 デフォルト = 1.0(実数) |
|
| Krz | Z回転剛性関数 12 デフォルト = 1.0(実数) |
|
| fct_IDXR | X回転剛性関数 (整数) |
|
| fct_IDYR | Y回転剛性関数 (整数) |
|
| fct_IDZR | Z回転剛性関数 (整数) |
|
| Crx | X回転粘性係数 13 デフォルト = 1.0(実数) |
|
| Cry | Y回転粘性係数 13 デフォルト = 1.0(実数) |
|
| Crz | Z回転粘性係数 13 デフォルト = 1.0(実数) |
|
| fct_IDXRC | X回転粘性関数 (整数) |
|
| fct_IDYRC | Y回転粘性関数 (整数) |
|
| fct_IDZRC | Z回転粘性関数 (整数) |
|
| fct_IDXT | X並進剛性関数 (整数) |
|
| fct_IDYT | Y並進剛性関数 (整数) |
|
| fct_IDZT | Z並進剛性関数 (整数) |
|
| Ktx | X並進剛性関数 12 デフォルト = 1.0(実数) |
|
| Kty | Y並進剛性関数 12 デフォルト = 1.0(実数) |
|
| Ktz | Z並進剛性関数 12 デフォルト = 1.0(実数) |
|
| Ctx | X並進粘性関数 13 デフォルト = 1.0(実数) |
|
| Cty | Y並進粘性関数 13 デフォルト = 1.0(実数) |
|
| Ctz | Z並進粘性関数 13 デフォルト = 1.0(実数) |
|
| fct_IDXTC | X並進粘性関数 (整数) |
|
| fct_IDYTC | Y並進粘性関数 (整数) |
|
| fct_IDZTC | Z並進粘性関数 (整数) |
コメント
- ジョイントは1つのスプリングと結合された物体に属する2つの局所座標軸によって定義されます。ここで局所軸の直交性を保証するため、結合されている物体は剛体であることを仮定します。ただし、変形しやすいボディをジョイントに結合することは可能ですが、その場合はRadiossによって警告が表示されます。さらに、変形中に軸の直交性が失われた場合、ジョイントの安定性を保証できなくなります。
- ジョイントのプロパティは2つの結合された座標系に関して計算された局所座標系で定義されます。これらは最初の時点で一致している必要はありません。局所座標軸の初期位置が常に一致する場合は、ジョイントの局所フレームは平均位置に定義されます。最初の時点で一致しない場合、局所軸はまず初期状態の平均位置に変換されます。次にその局所座標系はこれらの回転軸に関して計算されます。
- ジョイントの局所スキューフレームで計算される自由度の数は6です:
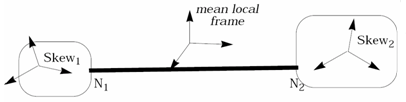
図 1. - 固定自由度とフリー自由度はそれぞれのジョイントタイプで区別されます。
- 固定自由度には剛性が一定しているという特徴があります。
- フリー自由度の剛性には大きい値を選択することを推奨します。フリー自由度では、ユーザー定義の特徴(線形または非線形弾性の場合がある)に臨界前粘性減衰を組み合わせます。
- 並進および回転自由度は次のように定義されます:
(1) ここで、 と は局所座標系における2つのジョイント節点の全変位です。(2) ここで と は局所ジョイント座標フレームに関する2つの結合された物体の全相対回転です。
- 力とモーメントの計算:
- 方向の力
は次のように計算されます:線形スプリング:
(3) : 並進剛性
: 並進粘性
非線形スプリング:(4) -
方向のモーメントは次のように計算されます:線形スプリング:
(5) : 回転剛性(Krx、Kry、Krz)
: 回転粘性(Crx、Cry、Crz)
非線形スプリング:(6) - ジョイントの長さは0にすることもできますが、常に0に等しくなければならないということはありません。ただし、球ジョイントまたはユニバーサルジョイントを定義する場合は、長さ0のスプリングを使用することを推奨します。
- 一般的なケースでモーメントの全体的なバランスを保つため、回転自由度の補正項は次のように計算されます:
(7) (8) (9)
- 方向の力
は次のように計算されます:
- 使用可能なジョイントのタイプ:
表 1. 使用可能なジョイント タイプ番号 ジョイントタイプ dx dy dz 1 球 x x x 0 0 0 2 回転 x x x 0 x x 3 円筒 0 x x 0 x x 4 平面 x 0 0 0 x x 5 ユニバーサル(Universal)(開発ソースのみ) x x x x 0 0 6 並進 0 x x x x x 7 オールダム x 0 0 x x x 8 剛性 x x x x x x 9 フリー 0 0 0 0 0 0 ここで:
x: 固定自由度
0: フリー(ユーザー定義)自由度:- ジョイントはユーザー定義の質量や慣性をもつことができません、このため節点時間ステップが常に用いられます。
- 粘性減衰を組み込む方法は以下の2つです:
- 1)臨界減衰の定義(固定自由度の場合のみ):
臨界減衰係数の項で粘性減衰を定義します。要素の固定剛性値を使用して臨界減衰係数が計算されます。質量と慣性は、ジョイントに結合されている各剛体の値の半分です。各剛体に1つしかジョイントが結合されていない場合は、この概算で十分です。それ以外の場合は、臨界減衰が過剰に予測されるため、Radioss入力の減衰係数を小さくしてください。すべての固定自由度には同じ減衰が適用されます。
- ユーザー定義の一定減衰または非線形減衰:
フリー自由度毎に独立した減衰パラメータを定義できます。
- Skflag = 1の場合は、1つ目の結合ボディの局所座標系としてジョイントの局所フレームが選択されます。この場合、平均スキュー位置は計算されません。ただし、2つ目の局所座標系は定義する必要があります。
- ユニバーサルジョイントの場合はこのオプションはアクティブではなく、常に両方のスキュー軸が局所ジョイントフレームの計算に使用されます。
- ユーザー定義の関数がない場合は、線形ジョイントに対して係数Krx、Kry、Krz、Ktx、Kty、Ktzが使用されます。いずれかの関数番号が0でない場合、対応する剛性係数は関数のスケールファクターになります。このルールは、すべてのジョイントタイプのすべての自由度に適用されます。
- ユーザー定義の関数がない場合、係数Crx、Cry、Crz、Ctx、CtyとCtzは線形粘性係数として用いられます。いずれかの関数番号が0で無い場合、対応する係数は関数のスケールファクターになります。
- ユニバーサルジョイントの長さは初期状態では0に等しくなければなりません。ユニバーサルジョイントの局所スキューシステムは以下のように定義されます:
Y局所軸 = 1つ目のボディの局所スキューシステムのX軸
Z局所軸 = 2つ目のボディの局所スキューシステムのX軸
X局所軸 = YΛ Z
- この局所フレームは最初の時点では直交している必要があります。したがって、2つの定義ボディスキュー軸のX軸が初期位置で直交する必要があります。ジョイントの局所フレームはその後、変形によって直交しなくなることもあります。その場合、力とモーメントはその非直交フレームで計算されます。
- 各/PROP/KJOINTでは、固有の局所座標系定義を使用します。 そのため、1つのプロパティで1つのスプリング要素のみを参照できます。