/PROP/TYPE45 (KJOINT2)
ブロックフォーマットのキーワード KJOINT2は、剛体または弾性体間のジョイント結合を実現するためのペナルティ結合に使用されます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE45/prop_ID/unit_IDまたは/PROP/KJOINT2/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Type | Kn | ScF | Cr | sens_ID | Skew_ID1 | Skew_ID2 | |||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kti | fct_Kti | SDi- | SDi+ | Icomb_ti | |||||
| Ct | fct_Cti | ||||||||
| Kfxi | FFi | fct_FFi | |||||||
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| Kri | fct_Kri | SAi- | SAi+ | Icomb_ri | |||||
| Cri | fct_Cri | ||||||||
| Kfri | FMi | fct_FMi | |||||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | (オプション)単位識別子 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| Type | ジョイントタイプ(ジョイントタイプリスト)
(整数) |
|
| Kn | 固定自由度の剛性 4
デフォルト = 0.0(実数) |
|
| ScF | Knのスケールファクター。 4 Kn= 0の場合、並進剛性と回転剛性の両方に作用するスケールファクター。 デフォルト = 1.0(実数) K n > 0の場合、回転剛性のみに作用するスケールファクター。 デフォルト = 10.0(実数) |
|
| Cr | 臨界減衰係数 4 デフォルト = 0.05(実数) |
|
| sens_ID | センサーの識別子 3 (整数) |
|
| Skew_ID1 | 1つ目のスキューシステムの識別子 4 (整数) |
|
| Skew_ID2 | 2つ目のスキューシステムの識別子 4 (整数) |
|
| Kti | 固定されていない自由度の並進剛性 4 fct_Kti= 0の場合、固定並進剛性値 fct_K ti > 0の場合、並進剛性スケールファクター デフォルト = 1.0(実数) |
または |
| fct_Kti | 並進力 vs 固定されていない自由度の変位の関数の識別子 (整数) |
|
| SDi-, SDi+ | 負と正の停止変位 8 デフォルト = 0.0(実数) |
|
| Cti | 固定されていない自由度の並進粘性係数 4 fct_Cti = 0の場合、 並進粘性 fct_Cti > 0の場合、並進粘性スケールファクター デフォルト = 1.0(実数) |
または |
| fct_Cti | 並進粘性力 vs 変位速度の関数の識別子 (整数) |
|
| Kfti | 摩擦の弾性剛性と停止変位 5 デフォルト = 0.0(実数) |
|
| FFi | 摩擦力の値 5 デフォルト = 0.0(実数) |
|
| fct_FFi | 摩擦力 vs 変位の関数の識別子 (整数) |
|
| Icomb_ti | 停止変位の結合のフラグ 10
(整数) |
|
| Kri | 固定されていない自由度の回転剛性係数 4 fct_Kri = 0の場合、固定回転剛性値 fct_Kri > 0の場合、回転剛性スケールファクター デフォルト = 1.0(実数) |
または |
| fct_Kri | 回転のモーメント vs 回転角度の関数の識別子 (整数) |
|
| SAi-, SAi+ | 負と正のラジアン単位での停止角度 8 デフォルト = 0.0(実数) |
|
| Cri | 固定されていない自由度の回転粘性係数 fct_Cri = 0の場合、固定回転粘性値 fct_Cri > 0の場合、回転粘性スケールファクター デフォルト = 1.0(実数) |
または |
| fct_Cri | 回転粘性のモーメント vs 回転角度速度の関数の識別子 (整数) |
|
| Kfri | 摩擦のラジアン当たりの弾性剛性と停止角度 5 デフォルト = 0.0(実数) |
|
| FMi | 固定されていない自由度の摩擦モーメント値 5 fct_FMi = 0の場合、固定摩擦モーメント値 fct_FMi > 0の場合、摩擦モーメントスケールファクター デフォルト = 0.0(実数) |
|
| fct_FMi | 摩擦のモーメント vs 回転角度の関数の識別子 (整数) |
|
| Icomb_ri | 停止角度の結合 10
(整数) |
ジョイントタイプリスト
| Type番号 | ジョイントタイプ | dx | dy | dz | |||
|---|---|---|---|---|---|---|---|
| 1 | 球 | x | x | x | 0 | 0 | 0 |
| 2 | 回転 | x | x | x | 0 | x | x |
| 3 | 円筒 | 0 | x | x | 0 | x | x |
| 4 | 平面 | x | 0 | 0 | 0 | x | x |
| 5 | ユニバーサル | x | x | x | x | 0 | 0 |
| 6 | 並進 | 0 | x | x | x | x | x |
| 7 | オールダム | x | 0 | 0 | x | x | x |
| 8 | 剛性 | x | x | x | x | x | x |
| 9 | フリー | 0 | 0 | 0 | 0 | 0 | 0 |
- x
- 固定自由度
- 0
- フリー(ユーザー定義)自由度
例(回転)
#RADIOSS STARTER
/UNIT/2
unit for prop
kg mm ms
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/TYPE45/2/2
Revolute
### - Define angle limit < 0.52rad
### - And define friction moment 100GPa to block angle (if it reached the limit)
# Type KN SCF CR SENSORID
2 0 0 0 0
# KR1Func_ID_Kr SA1- SA1+ Icomb_r1
0 0 0 .52 0
# CR1Func_ID_Cr
0 0
# KFR1 FM1 FCT_FM1
0 100 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATA例(並進)
#RADIOSS STARTER
/UNIT/2
unit for prop
kg mm ms
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/TYPE45/12/2
Translational
### - define displacement limit: -100mm ~ 100 mm
# Type KN SCF CR SENSORID
6 0 0 .2 0
# KX1Func_ID_Kx SD1- SD1+ Icomb_t1
0 0 -100 100 0
# CX1Func_ID_Cx
0 0
# KFX1 FF1 FCT_FF1
1000 0 0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATAコメント
- KJOINT2スプリングは通常、剛体を接続するために使用されますが、変形可能な要素の節点を接続するためにも使用できます。変形可能な要素の節点を接続する際、要素の節点に回転自由度(DOF)がない場合は、モーメントは伝達されません。これには以下のケースが含まれます:ソリッド要素とトラス要素の節点に対するすべての回転自由度、シェルプロパティIdril=2(デフォルト)を持つシェル要素のドリリング自由度、およびビーム要素とスプリング要素の節点に対する何らかの自由度。
- スプリング要素:
- その識別子は、それぞれの要素ファミリー内で一意である必要がありますが、グローバルモデルにおいて、各要素タイプが固有の要素識別子を持つことが推奨されます。
- パートの定義には複数のスプリングブロックを使用できます。
- スプリングの自由度:
- ジョイントプロパティはジョイント要素の局所座標系で定義されます。
- 局所座標系のフレームで計算されるジョイントの自由度数は6です:
- 固定自由度とフリー自由度はそれぞれのジョイントタイプで区別されます。
- 固定自由度には剛性が一定しているという特徴があります。デフォルトでは、剛性値が入力されていない場合、剛性の値が時間ステップを保つように自動計算されます。
- 並進および回転自由度は次のように定義されます:
(1) ここで、 と は局所座標系における2つのジョイント節点の全変位です。(2) ここで、 と は、ジョイントの局所座標系を基準とした、2つの結合された物体軸の全相対回転です。
- sens_IDが定義された場合、ジョイントはセンサーがアクティブになった時(全ての自由度が)完全に固定されます。
- 力とモーメントの計算:
- 方向の力
は次のように計算されます:線形スプリング:
(3) : 並進剛性
: 並進粘性
非線形スプリング:(4) -
方向のモーメントは次のように計算されます:線形スプリング:
(5) : 回転剛性( )
: 回転粘性( )
非線形スプリング:(6) - ジョイントの長さは0にすることもできますが、常に0に等しくなければならないということはありません。球面ジョイントやユニバーサルジョイントの定義には長さ0のスプリングを用いることを推奨します。
- 一般的なケースでモーメントの全体的なバランスを保つため、回転自由度の補正項は次のように計算されます:
(7) (8) (9) ジョイントはユーザー定義の質量や慣性をもつことができません、このため節点時間ステップが常に用いられます。節点の時間ステップは、ジョイントが接続するエンティティに基づいています。剛体のメイン節点に取り付けられている場合、剛体の時間ステップが使用されます。変形可能要素の節点に取り付けられている場合、節点時間は変形可能な要素に基づいて計算されます。
- 方向の力
は次のように計算されます:
- スプリングの剛性
- ユーザー定義の関数がない場合、係数 と は一定の剛性として用いられます。関数が定義されている場合、対応する剛性係数は関数のスケールファクターになります。
- Kn = 0の場合、固定剛性は時間ステップを保つように併進と回転自由度に対して計算開始時に自動的に計算されます。これらの値はモデルの物理現象に応じて選択することもできますが、その剛性は隣接要素よりも高い必要があります。
- Kn = 0の場合、Scfは並進と回転固定剛性の両方に作用するスケールファクターです。Kn > 0の場合、Scfは固定回転剛性にのみ作用します。このパラメータは固定回転剛性をマニュアルで調整するために用いられます。
- スプリングの粘性
- ユーザー定義の関数がない場合、係数 と は線形粘性係数として用いられます。関数が定義されている場合、対応する係数は関数のスケールファクターになります。
- 粘性減衰を組み込む方法は以下の2つです:
- 臨界減衰の定義(固定自由度の場合のみ):
臨界減衰係数の項で粘性減衰を定義します。臨界減衰係数は、要素の固定剛性値と換算質量(接続された節点の質量の調和平均の半分)を使用して計算されます。すべての固定自由度には同じ臨界減衰が適用されます。
- ユーザー定義の一定減衰または非線形減衰:
フリー自由度毎に独立した減衰パラメータを定義できます。
剛性および減衰の詳細については、ユーザーズガイドのスプリングジョイントTYPE45(/PROP/KJOINT2)をご参照ください。
- 臨界減衰の定義(固定自由度の場合のみ):
- 摩擦
- KftiまたはKfriが定義されていない場合、摩擦はアクティブになりません。
- FFiとFMiはユーザー定義の関数がない場合に、一定の摩擦力とモーメントとして用いられます。摩擦関数番号が0でない場合、FMiとFFiは関数のスケールファクターとなります(デフォルト値 = 1.0)。
- スプリングの限界
- SDi-またはSDi+に0以外の値が指定された場合、変位が正の変位のためのSDi+を超えることや、負の変位のためのSDi-を超えることがないよう、さらにペナルティ力がかけられます。このペナルティ力はKftiを用いて計算されます。
- SAi-またはSAi+に0以外の値が指定された場合、回転が正の回転のためのSAi+を超えることや、負の回転のためのSAi-を超えることがないよう、さらにペナルティモーメントがかけられます。このペナルティ力はKを用いて計算されますfri
- スプリングのスキュー
- Skew_ID1が定義されている場合、初期局所座標系はSkew_ID1によって定義されます。Skew_ID1 = 0である場合、局所座標系はスプリングの追加節点に従って計算されます。詳細については、/SPRINGをご参照ください。
- Skew_ID2が0ではない場合、ジョイントの回転角は、Skew_ID1とSkew_ID2の間の回転に従って初期化されます。初期角度の値は、Starter出力ファイルで確認できます。回転ジョイント(TYPE2)、円筒ジョイント(TYPE3)、および平面ジョイント(TYPE4)では
のみを初期化できます。Skew_ID1とSkew_ID2の最初の軸は平行であることが必要です。
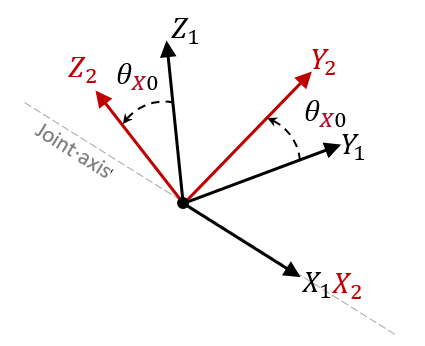
図 1. 回転ジョイント(タイプ2)の初期回転角の計算 - Skew_ID2が0ではなく、Skew_ID1 =0である場合、Skew_ID1は全体座標系です。
- 局所座標系の向きは、node_ID1(/SPRING)の回転に伴って更新されます。
- 停止変位 / 角度の結合のフラグ:
- Icomb_ti = 0:の場合: 停止変位は独立(デフォルト)です(図 2に示すとおり)。停止変位は、各方向で別々にチェックされます。
- Icomb_ti = 1の場合: すべての自由な並進自由度の停止変位が結合されます。停止基準は変位に適用されなくなりますが、結合される変位のノルムについては、図 3をご参照ください。
- 2つまたは3つの停止変位が結合されます。
- 停止変位が結合されると、同じSDi-とSDi+の値が各自由度に使用される必要があります。
- 上記の停止変位の記述は、Icomb_riを用いて定義された停止角度にも適用されます。
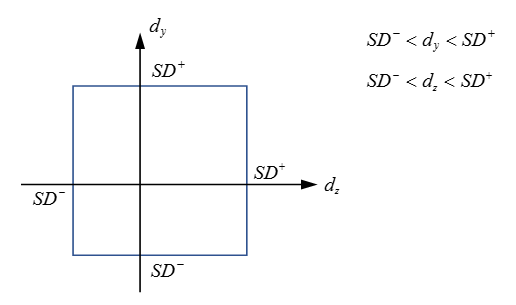
図 2. 独立停止変位を伴う平面ジョイント、Icomb_ti=0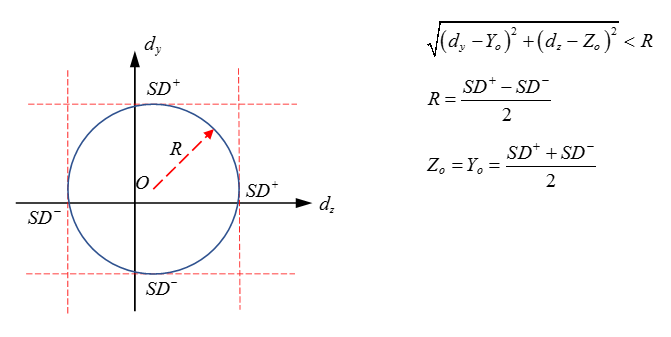
図 3. 2つの結合された停止変位を伴う平面ジョイント、Icomb_ti=1