/PROP/TYPE12 (SPR_PUL)
ブロックフォーマットのキーワード プーリースプリングプロパティセット(1つの並進自由度を持つ)はプーリーのモデル化に用いられます。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| /PROP/TYPE12/prop_ID/unit_IDまたは/PROP/SPR_PUL/prop_ID/unit_ID | |||||||||
| prop_title | |||||||||
| Mass | sens_ID | Isflag | Ileng | Fric | |||||
| K1 | C1 | A1 | B1 | D1 | |||||
| fct_ID11 | H1 | fct_ID21 | fct_ID31 | fct_ID41 | |||||
| F1 | E1 | Ascale1 | Hscale1 | ||||||
| fct_IDfr | Ifr | Yscale_F | Xscale_F | F_min | F_max | ||||
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| prop_ID | プロパティの識別子 (整数、最大10桁) |
|
| unit_ID | 単位識別子 (整数、最大10桁) |
|
| prop_title | プロパティのタイトル (文字、最大100文字) |
|
| Mass | 質量。
(実数) |
または |
| sens_ID | センサーの識別子 (整数) |
|
| Isflag | センサーフラグ 4 5
(整数) |
|
| Ileng | 単位長さあたりの入力フラグ
(整数) |
|
| Fric | Coulomb摩擦。 6 (実数) |
|
| K1 | 剛性
、ただしIleng= 0
(実数) |
|
剛性
、ただしIleng= 1
(実数) |
||
| C1 | 減衰
、ただしIleng= 0 (実数) |
|
| 減衰
、ただしIleng= 1 (実数) |
||
| A1 | 引張に対するひずみ速度の係数(力に対して均一) デフォルト = 1.0(実数) |
|
| B1 | 引張に対するひずみ速度の対数係数(力に対して均一) (実数) |
|
| D1 | 伸び速度のスケール係数 デフォルト = 1.0(実数) |
|
| fct_ID11 |
(Ileng= 0)または
(Ileng= 1)を定義する剛性関数識別子
(整数) |
|
| H1 | 非線形スプリングの硬化フラグ
(整数) |
|
| fct_ID21 |
(Ileng= 0)または
(Ileng=1)でのスプリング変位(または回転)速度に伴う力の変化を定義する関数 (整数) |
|
| fct_ID31 | 除荷専用の関数 H1 = 4の場合:下方の降伏曲線を定義する関数識別子。 H1 = 5の場合:残差変位対最大変位を定義する関数識別子。 H1 = 6の場合:非線形除荷曲線を定義する関数識別子。 H1 = 7の場合:非線形除荷曲線を定義する関数識別子。 (整数) |
|
| fct_ID41 |
(Ileng= 0)または
(Ileng=1)での速度または変形速度依存性を考慮する関数。 (整数) |
|
| 負の破壊変位(Ileng=0の場合)、または 負の破壊変位 x (Ileng=1の場合) デフォルト = -1030(実数) |
||
| 正の破壊変位(Ileng=0の場合)、または 正の破壊変位 x (Ileng=1の場合) デフォルト = 1030(実数) |
||
| F1 |
または
のスケールファクター(
または
のfct_ID21関数の横軸) (実数) |
|
| E1 | ひずみ速度効果(力に対して均一)である
または
(fct_ID21関数)のスケールファクター (実数) |
|
| Ascale1 |
または
のスケールファクター(
または
のfct_ID11関数の横軸) (実数) |
|
| Hscale1 | 力に対して均一な
または
(fct_ID41関数)のスケールファクター デフォルト = 1.0(実数) |
|
| fct_IDfr | プーリーの左右アーム間の力の差異の関数として摩擦係数Fricのスケーリングを定義する関数識別子 (整数) |
|
| Ifr | 摩擦モデルフラグ 6
(整数) |
|
| Yscale_F | 関数fct_IDfrの縦軸スケール デフォルト = 1.0(実数) |
|
| Xscale_F | 関数fct_IDfrの横軸スケール デフォルト = 0.0(実数) |
|
| F_min | 不可逆的摩擦モデルの負の制限力 Ifr = 1の場合のみ使用 6 デフォルト = -1030(実数) |
|
| F_max | 不可逆的摩擦モデルの正の制限力 Ifr = 1の場合のみ使用 6 デフォルト = 1030(実数) |
例
/UNIT/2
unit for prop
Mg mm s
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/PROP/SPR_PUL/1/2
pulley spring example with friction
# Mass sensor_ID Isflag Ileng Fric
2.7e-5 0 0 0 1
# K C A B D
10000 .001 0 0 0
#funct_ID1 H funct_ID2 funct_ID3 funct_ID4 delta_min delta_max
1 0 0 0 0 0 0
# Fscale1 E Ascalex H4
0 0 0 0
# Fct_IDfr Ifr Yscale_F Xscale_F F_MIN F_MAX
2 1 0 0 -800 4500
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/1
non-linear elastic
# Disp. Force
# X Y
-1 -0.1
0 0
1 10000
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
/FUNCT/2
friction function
# Force Fric
# X Y
-1000 0.2
1000 0.2
2000 0.3
4000 0.9
5000 1.0
10000 1.0
#---1----|----2----|----3----|----4----|----5----|----6----|----7----|----8----|----9----|---10----|
#ENDDATAコメント
- このプロパティは、節点1と節点3がロープの末端、節点2がプーリー位置にある3節点/SPRING要素を用いてモデル化されています。
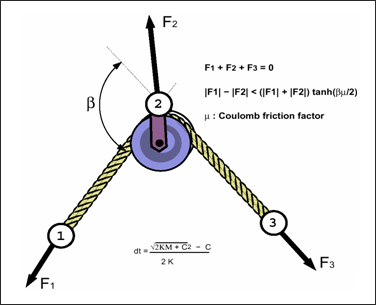
図 1.節点1が節点2にスライドすると、プーリーを通して移動が不可能なノット(結び目)が節点1にあるかのように、ロッキングが起こります。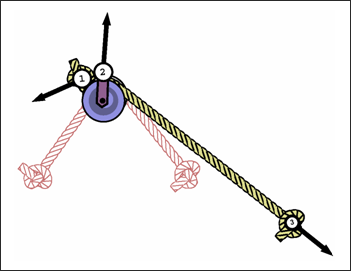
図 2. - 力の計算:
- Ileng =0(フラグIlengは3行目で定義)の場合、スプリングの力は次の式で計算されます。
(1) ここで、
ここで、 は、スプリング要素の現在の長さと初期の長さの差です。
- Ileng = 1の場合、すべての入力は単位長さあたりの値になります:
スプリングの質量 =
スプリングの剛性 =
スプリングの減衰 =
スプリングの慣性 =
ここで、 は、スプリングの基準長さです。
- スプリングの力の値は次のように計算されます。
(2) ここで、 は以下の式で表される工学ひずみです:(3) 工学ひずみと工学ひずみ速度に対して荷重関数を指定します。
破壊基準は、ひずみに対して次のように定義されます。正 / 負の破壊限界の入力は、右記の初期長さに関係付ける必要があります;
- Ileng =0(フラグIlengは3行目で定義)の場合、スプリングの力は次の式で計算されます。
- (各 )が0の場合、その方向の破壊は発生しません。 は負でなければなりません。線形スプリングの場合、 と は0の関数になり、A1、B1、およびE1は考慮されません。
- スプリングはセンサーでアクティブ化かつ / または非アクティブ化されます:
- sens_ID ≠ 0かつIsflag = 0の場合、スプリング要素はsens_IDによってアクティブになります。
- sens_ID ≠ 0かつIsflag = 1の場合、スプリング要素はsens_IDによって非アクティブになります。
- sens_ID
0かつIsflag = 2の場合:
- スプリングはsens_IDでアクティブ化かつ / または非アクティブ化されます:(センサーがONでスプリングはON、センサーがOFFでスプリングはOFF)。
- スプリングの基準長さ( )は、センサーがアクティブになるときのスプリングの節点N1とN2の間の距離です。
- スプリングをアクティブまたは非アクティブにするためにセンサーを使用する場合、センサーによってスプリングがアクティブ(または非アクティブ)になるときのスプリングの基準長さは時刻0における節点間の距離に等しくなります(ただし、センサーフラグが2の場合を除きます)。
- 摩擦モデル定義:
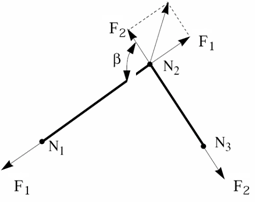
図 3.- fct_IDfrかつFric = 0(摩擦なし)の場合、 。
- fct_IDfr = 0かつFric > 0の場合は、一定のクーロン摩擦係数が使用されます:
- fct_IDfr > 0の場合は、2つのプーリーブランチ間の相対力に関する関数として可変摩擦が計算されます:
Ifr= 0(対称挙動)
Ifr= 1(非対称挙動)
摩擦力 は次のように計算されます:(4) ここで、(5) - 角度(単位はラジアン)
- fct_IDの関数fr
- Ifr = 1(非対称挙動)の場合、F_min (またはF_maxに達すると、摩擦は永久に、摩擦定義から一定値Fricに切り替えられます。
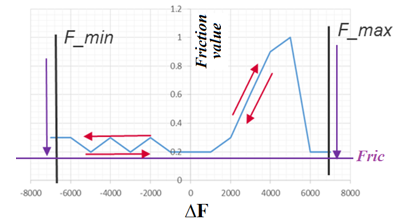
図 4.そうでない場合、摩擦の値は入力関数fct_IDfrに従って定義されます。