イベントの追加
以前に構築したモデルにライドイベントを追加します。
Task Wizardを使用して、9つの標準イベントをハーフカーモデルに追加できます。特殊なタスク用のユーザー定義イベントも使用可能ですが、MDLとMotionSolve XML入力デックの両方を十分に理解したうえで使用する必要があります。ライドイベントの追加方法は以下のとおりです。
-
AnalysisメニューからTask Wizardを選択し、モデルへのイベントの追加を開始します。
図 1. -
このモデルではStatic Ride Analysisを選択します。
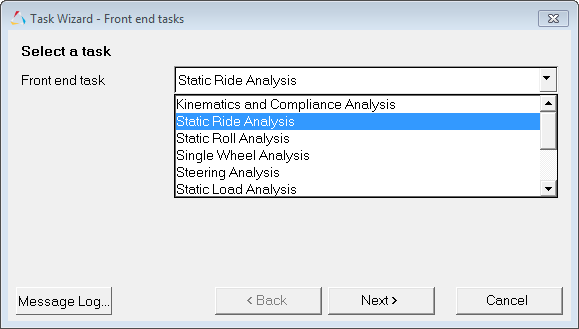
図 2.注: フロントサスペンションモデルに追加できるイベントは9種類あります。 -
Finishを選択してTask Wizardを完了します。
図 3. -
車両に関する必要な情報を追加します。この情報はサスペンション設計係数の計算で使用します。後から変更することもできます。
これでメカニズムがモデルに追加され、サスペンションのライドストロークを作成できます。
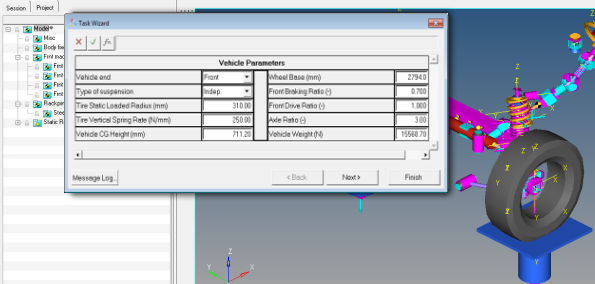
図 4. -
ジャウンスおよびリバウンドのイベント時のサスペンションの移動距離を追加します。このイベント中、ハンドルは固定されます。
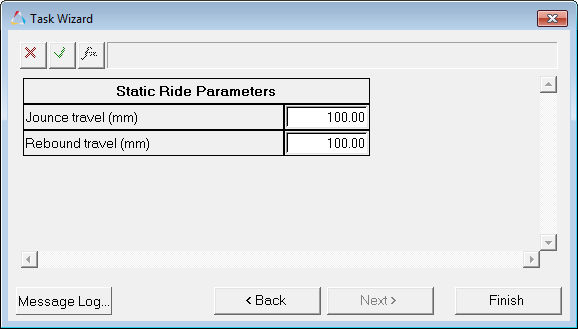
図 5.Static Ride Analysisイベントが、最後のSystem/Analysisとしてブラウザに表示されます。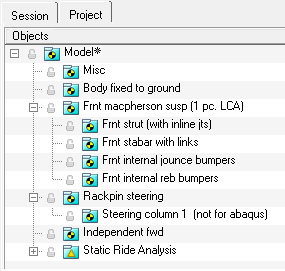
図 6.Static Ride Analysisイベントには、ライドイベントを作成するためのさまざまなMotionViewモデリング要素が用意されています。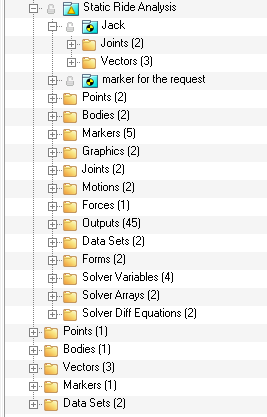
図 7.このイベントでサスペンション設計係数が作成されます。これらの係数はサスペンションの性能を評価する際に使用します。それらは、解析対象のサスペンションのトポロジに適合するように自動的に作成されます。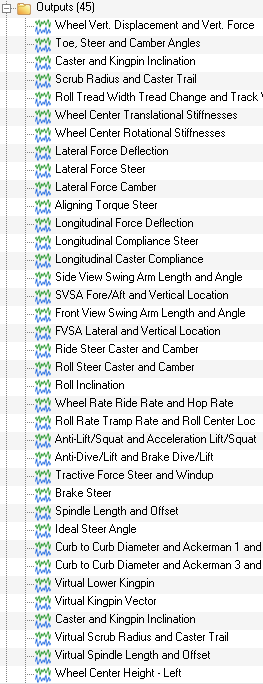
図 8.