Power-off in a Straight Line
Power-off in a Straight Line eventは、駆動トルクが突然消失した場合の車両の運動状態をシミュレートします。ステアコントローラーによって直線上で車両を運転し、スロットルが消失するまで駆動トルクコントローラーによって速度を維持します。スロットルトルクの消失後はエンジンモータリングトルクが適用されません。結果をプロットするために、プロットテンプレートが用意されています。
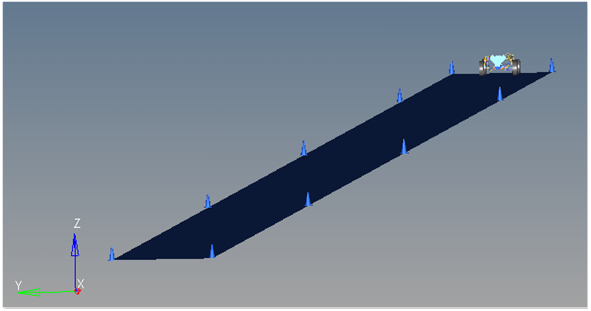
図 1. Power-off in a Straight Lineイベント

図 2. Power-off in a Straight Lineの経路の上面図
Power-off in a Straight Line eventは、Assembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。このイベントは、Task Wizardを使用して追加すると、自動的にモデルに付加されます。イベントのアタッチメント方式が厳密に順守されていれば、手動で構築したモデルでもこのイベントを使用できます。
このイベントでは、車両が直線道路を車両速度で走行し、ドライバーコントローラーを使用して道路のセンターライン上を進みます。駆動トルクコントローラーで車両の速度を維持します。スロットル遅延時間の時点で、駆動トルクが除去され始め、関数を使用してスロットルステップ継続時間を経て除去されます。イベントは終了時間で終了します。時間ステップの秒数経過ごとにデータがプロットファイルとグラフィックスファイルに出力されます。
テストは、一般的な車両特性テストで、突然のスロットルトルクの消失に対する車両応答を理解するために使用されます。ビークルダイナミクスのエンジニアは、通常イベント中の車両状態応答とタイヤ挙動に注目します。これらのシグナルのすべてがプロットファイルに保存されます。
- 名前
- 説明
- Vehicle Velocity (mph)
- イベントの定常状態駆動部分における車両の初期速度(マイル / 時)。
- Lane Graphics Width (m)
- メートル単位の車線グラフィックスの幅。この車線グラフィックスは図表示にのみ使用されます。路面は無限幅の平面であり、.rdfファイルでタイヤシステムに定義します。
- Ground z Coordinate (mm)
- 地上z座標の計算値。変更しないでください。この値は、路面と車線グラフィックスの配置に使用されます。タイヤフォームに入力した左前輪の中心と左前タイヤの転がり半径を使用して計算されます。
- Throttle Delay (sec)
- スロットルトルクが0に移行し始める秒単位の絶対時間。
- Throttle Step Duration (sec)
- スロットルコントローラーがドライブトレインからすべてのトルクを除去するのに要する時間の長さ。除去はステップ関数を使用して実行されます。
- End Time (sec)
- イベントの秒単位の絶対終了時間。
- Time Step (sec)
- 出力ステップサイズ。データはこの時間間隔で出力プロットファイルとグラフィックスファイルに書き込まれます。
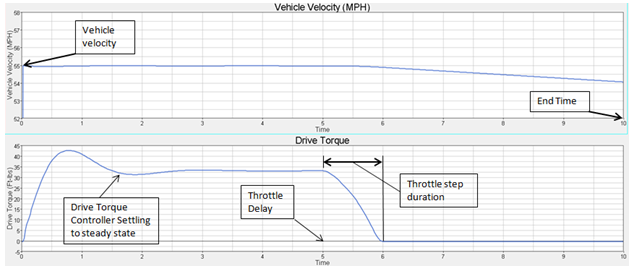
図 3. Power-off in a Straight Line
イベントを定義するために、10タイプのモデリング要素コンテナーが使用されています。このイベントには、3つのサブシステムとして、出力リクエスト、ステアコントローラー、および駆動トルクコントローラーもあります。
カーブ
このイベントには1つのカーブが組み込まれています。ステアリングコントローラーはカーブによって定義された経路に従います。このカーブは車線経路のセンターライン(グローバルY=0)上にあり、奇数番号のコーンポイントの値を使用してX座標とZ座標をパラメータで定義します。
データセット
このシステムでは、Power-off in a Straight Line eventを記述するデータを収めたデータセットが1つ使用されています。このイベントを使用すると、車両制御、レーングラフィックス幅、スロットル遅延、スロットルステップ期間、終了時間、および時間ステップを設定できます。ホイール回転速度および地面の高さ(下の図で背景が青色の部分)は計算された値です。車両イベントデータはイベントフォームで変更できます。
フォーム
フォームは、Power-off in a Straight Line eventに関する入力を変更する必要のある唯一の場所です。変更可能なパラメータは、車両速度、レーングラフィックス、スロットル遅延、スロットルステップ期間、終了時間、および時間ステップです。地上z座標は計算値なので変更できません。
グラフィックス
11のグラフィックスがイベント内で定義されています。グラフィックスは、コーンと直線道路サーフェスを定義し、ユーザーが入力する必要はありません。グラフィックス要素の詳しい説明をここに記載します。
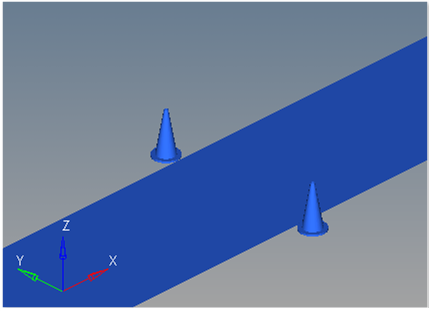
図 4. コーンのグラフィックス
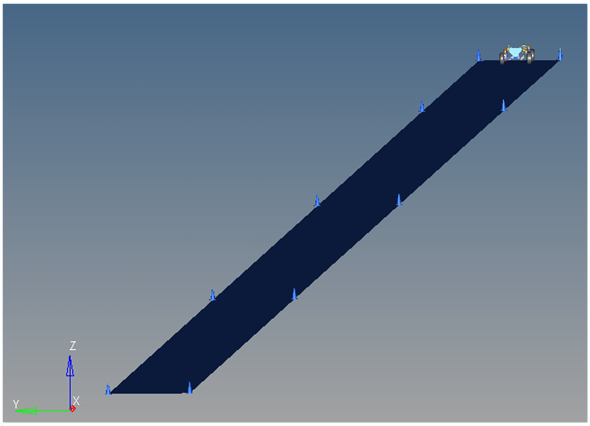
図 5. Power-off in a Straight Line - 道路グラフィックス
ジョイント
Power-off in a Straight Line eventにはボールジョイントが1つあります。このジョイントは、ダミーボディをステアリングラックに結合します。ジョイントは、特定のイベントをADAMSで機能させるために含まれています。モデルを手動で構築する場合は、ダミーボディをステアリングラックに結合します。
マーカー
Power-off in a Straight Line eventには5つのマーカーがあります。経路の原点は、すべてのレーンチェンジグラフィックスの原点で、車体のCGになるようにパラメータで定義されます。残りの4つのマーカーは、路面グラフィック要素の4つのコーナーを定義するために使用されます。マーカーはポイントを指し示し、ポイントには路面を定義するパラメータのロジックが含まれます。
どのマーカーにもユーザー入力は必要ありません。
モーション
3つのモーションがイベントに組み込まれています。車両に対するステアリングモーションは、ステアコントローラーによって提供され、ステアリングコラムを車体に接合する回転ジョイントに作用します。モデルにステアリングコラムがない場合、このジョイントはステアリングラック入力軸と車体の間で機能します。
前輪と後輪のモーションは、ホイールハブをナックルに結合する、ホイールスピンドルの回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動的解析中にタイヤが回転できるように、静解析の収束後、ホイールロッキングモーションは非アクティブ化されます。
ポイント
15のポイントがイベント内で定義されています。ポイントはすべて、車線のグラフィックスと、車線を示すために使用するコーンのグラフィックスを作成するために使用されます。これらのポイントは、そのX、Y、Zの位置を定義するパラメータロジックを備えています。ポイントは、路肩に沿って約100mおきに配置されます。ポイントは変更しないでください。
ソルバー変数
Power-off in a Straight Line eventには、1つのソルバー変数のSteer Path変数があります。Steer Path変数は、ステアコントローラーの経路を定義します。イベントでは、必要な経路として車線経路カーブが使用されます。
- 番号
- 説明
- 5030
- ブランチID。5030はPower-off in a straight lineイベントです。
- 70000000
- Driver Model Controllerデータを含むソルバー配列のID。この配列は、ステアコントローラーシステムにあります。
- 70000100
- 車両情報を記述した車両データ配列のID。この配列は、ステアコントローラーシステムにあります。
- 317001
- 車線経路カーブの値。
Templates
Power-off in a Straight Line eventにはテンプレートが1つあります。このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。テンプレートは、</Model>コマンドの後にソルバーデックに挿入され、イベントの実行を制御します。
このイベントのテンプレートには、Motion_Jointコマンドに加えて、イベントの標準要素も含まれています。このコマンドは、ソルバー変数(sv_path.idstring)にするステアリングの動きを割り当てます。これにより、ステアリングコントローラーの機能が有効になります。
<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
<Motion_Joint
id = "{wh_motion.idstring}"
expr = "VARVAL({sv_path.idstring})"
/>
<Simulate
analysis_type = "Transient"
end_time = "{ds.end_time.value}"
num_steps = "{ds.end_time.value/ds.time_step.value}"
/>
<Stop/>参考資料
ISO +4138-2004 - Passenger cars — Steady-state circular driving behaviour — Open-loop test methods.