Swept Steer
Swept Steer eventは、一定の速度で走行する車両に対する、大きさが漸増するステアリング入力をシミュレートします。通常、このイベントは、車両の定常状態の動的応答を予測するために使用します。入力はステアリングホイール角またはトルクのいずれかに設定できます。イベントには標準の車両出力リクエストが組み込まれています。一定の速度を維持するために駆動トルクコントローラーが組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
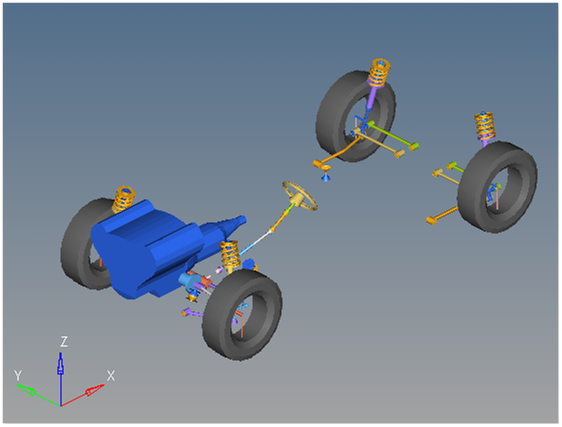
図 1. Swept Steer event
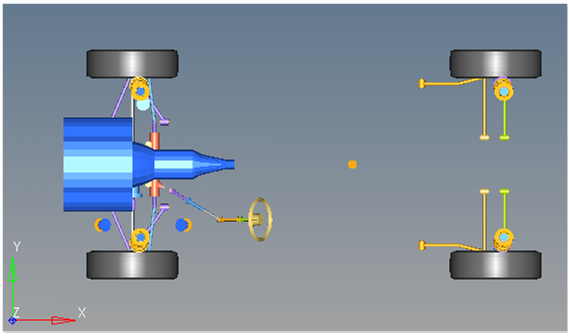
図 2. Swept Steer eventの上面図
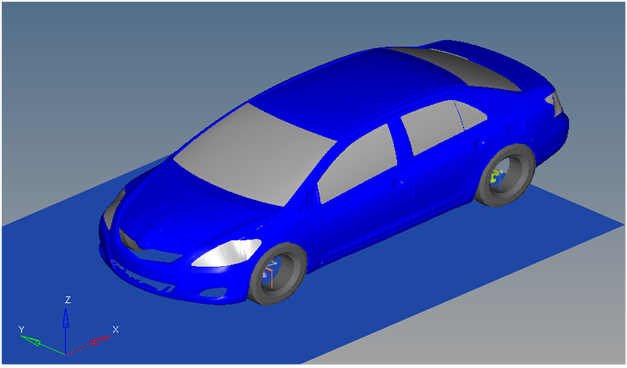
図 3. ボディグラフィックスが表示された車両モデル
説明
このイベントは、MotionView Assembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
- 時間
- 説明
- 0秒
- 車両は静的平衡状態で走行し、所定の速度で動的走行に切り替わります。
- 0.001秒
- 0からイベントフォームの入力値へ移行するステップ関数を使用して、初期ステアリングホイール角またはトルクが適用されます。
- 0.5秒
- フォームで定義した変化率で、ステアリングホイール角またはトルクが適用されます。
- イベントの終了
- フォームでの定義に従い、ステアリングホイール角またはトルクの最大値が適用されると、イベントは終了します。この手順はイベントテンプレートにあり、必要に応じて変更できます。
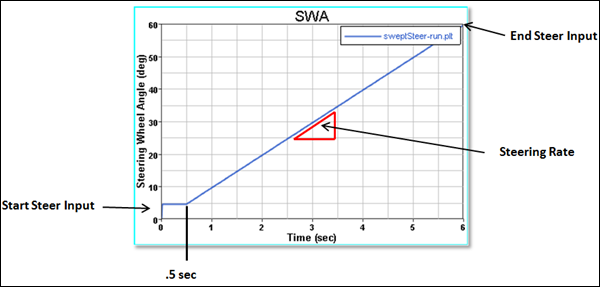
図 4. Steering Wheel Angle vs. Time
アタッチメント
イベントは標準のイベントアタッチメントを使用します。Model Wizardを使用してモデルを構築している場合、アタッチメントは自動的に定義されます。アタッチメントには、イベントが解析を実行するために必要な最小限のデータが格納されています。アタッチメントは、大半のイベントで標準です。データセット
システム内ではデータセットが1つ使用され、そこにはSwept steerイベントを記述するために使用するデータと、初期ホイール角速度および初期Z高さが格納されています。このイベントでは、車両の初期速度、ステアリング入力タイプ(角度またはトルク)、ステアリング入力の開始時間、ステアリング変化率、ステアリングの最大値を設定できます。これらの値はイベントのFormに入力します。ホイール回転速度および地面の高さは計算された値で、変更できません。フォース
Swept steerは、ステアリングトルクというフォースのみで構成されます。このフォースはステアリングに関する入力として使用されます。選択されたステアリング入力のタイプがトルクの場合、モーションは非アクティブになり、ハンドルの回転にはフォースが使用されます。デフォルトではフォースはゼロに設定されます。フォーム
Formは、Swept steerイベントを変更する唯一の場所です。変更可能なパラメータは、車両の初期速度、ステアリング入力の開始時間、ステアリング変化率、ステアリングの最大値です。ステアリング入力タイプも変更可能で、角度またはトルクに設定できます。ジョイント
Swept steerイベントには球ジョイントが1つ組み込まれています。ジョイントは、ダミーボディをステアリングラックに付加します。ジョイントは、特定のイベントをADAMSで動作させるために含まれています。モデルを手動で構築する場合にダミーボディをステアリングラックに付加します。モーション
3つのモーションがイベントに組み込まれています。ステアリングモーションはハンドルのモーションを定義し、ハンドルを車体に接合する回転ジョイントに作用します。ステアリングコラムがモデルに含まれない場合、モーションがステアリングラックのインプットシャフトと車体の間のジョイントに作用します。
Front Wheel MotionおよびRear Wheel Motionは、ホイールのハブをナックルに繋ぐホイールのスピンドル回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動的解析中にタイヤが回転できるように、静解析の収束後、ホイールロッキングモーションは非アクティブ化されます。
Templates
Swept steerイベントタスクにはテンプレートが組み込まれています。このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。このテンプレートは、</Model>コマンドの後にソルバーデックに挿入されて、このイベントの実行を制御します。<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
{if ds.inp_type.value == "Angle"}
<Deactivate
element_type = "FORCE"
element_id = "{tor_str.idstring}"
/>
<Motion_Joint
id = "{wh_motion.idstring}"
expr = "IF(TIME-.5:{-ds.str_mag.value}D*STEP(TIME,0,0,0.001,1),{-ds.str_mag.value}D,{-ds.str_rate.value}D*(TIME-.5)-{ds.str_mag.value}D)"
/>
<Simulate
analysis_type = "Transient"
end_time = "{(ds.max_str.value-ds.str_mag.value)/ds.str_rate.value+.5}"
num_steps = "{((ds.max_str.value-ds.str_mag.value)/ds.str_rate.value+.5)*100}"
/>
{else}
<Deactivate
element_type = "MOTION"
element_id = "{wh_motion.idstring}"
/>
<Force_Scalar_TwoBody
id = "{tor_str.idstring}"
type = "Torque"
val_expression = "IF(TIME-.5:{-ds.str_mag.value},{-ds.str_mag.value},{-ds.str_rate.value}*(TIME-.5)-{ds.str_mag.value})"
/>
<Simulate
analysis_type = "Transient"
end_time = "{(ds.max_str.value-ds.str_mag.value)/ds.str_rate.value+.5}"
num_steps = "{((ds.max_str.value-ds.str_mag.value)/ds.str_rate.value+.5)*100}"
/>
{endif}
<Stop/>参考資料
ISO +7401-2003 - Road vehicles — Lateral transient response test methods — Open-loop test methods