Steer Release in a Turn
Sinusoidal steeringイベントは、正弦波入力をハンドルに適用した状態で、一定速度での車両の走行をシミュレートします。このイベントは、SAEペーパー840069に説明されているオンセンターステアリングテストをシミュレートするために使用されます。イベントには標準の車両出力が組み込まれています。ボディシステムにはボディ状態変数の出力リクエスト(変位、速度、加速度)が用意され、タイヤシステムにはタイヤの出力が用意されています。結果をプロットするために、プロットテンプレートが用意されています。
Steer Release in a Turn eventは、定常円旋回での車両のコーナリングと、コーナーを旋回中にハンドルを放したときの動的挙動をシミュレートします。ステアコントローラーを使用して定常円旋回のカーブ上で車両を運転し、駆動トルクコントローラーを使用して一定の速度を維持します。また、タイヤシステムと出力リクエストシステムには、車両とタイヤの標準出力が組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
図 1. Steer Release in a Turn event
図 2. Steer Release in a Turn eventの上面図(車両は非常に小さい)
図 3. ボディグラフィックスが表示された車両モデル
説明
このイベントは、MotionView Assembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
| 入力 | 単位 | 説明 |
|---|---|---|
| Lateral Acceleration | G | イベントの定常円旋回部分における車両の横加速度。横加速度と円の半径を使用して車両の速度を計算します。 |
| Circle Radius | メートル | 定常円旋回の円の半径。ステアコントローラーは、車体位置の重心を使用して、この半径の円周を追従しようとします。 |
| Turn Direction | 左または右 | 半径は左回りまたは右回りです。 |
| Steer Release Time | 秒 | イベント内でハンドルが解放される時間。ハンドルが解放された後、5秒でイベントは終了します。 |
| Vehicle Velocity | マイル/時 | 車両の速度。この速度は、目的の横加速度とコーナーの半径を使用して計算されます。 |
| Ground Z Coordinate | 地面からのZ高さ | 地面の高さ。左前輪の重心と、タイヤデータフォームに入力したタイヤの静的荷重半径を使用して計算されます。 |
| 時間 | 説明 | 詳細 |
|---|---|---|
| 0 | 静的解析 | 車両に関する静的解析が実行されます。 |
| 0+ | ジョイント解放 | 車両を地面に固定しているジョイントと、ホイールをスピンドルに固定しているジョイントが解放され、車両が動的に走れるようになります。これを実行するコマンドは車両イベントテンプレート内にあります。 |
| 0++ | 動解析 | 直線道路の入口長さセクションに沿って車両が動的に走行し始めます。 |
| Varies | Constant Radius | 車両が定常円旋回のコーナーに入ります。ハンドルを解放する前に、定常のコーナリング状態にする必要があります。 |
| Steer Release Time | ハンドル解放 | ステアコントローラーは車両を操縦しなくなっています。ハンドルは自由に自分で回転します。 |
| Steer Release time +5 sec | イベント終了 | イベントが終了します。イベントテンプレートを変更することで、終了時間を変更できます。 |
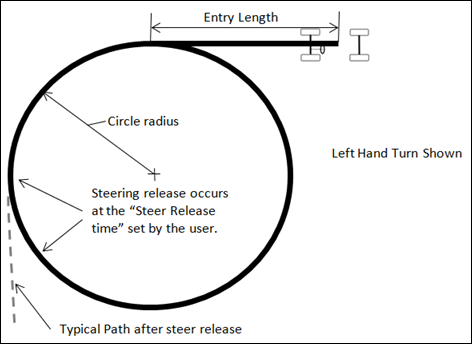
図 4. イベント図 - Steering Release in a Turn
ステアコントローラーは、ハンドルまたはステアリングラックの入力シャフト(ステアリングコラムがない場合)のいずれかのジョイントにモーションを適用することで、直線および定常円旋回の経路に沿って車両を運転します。このコントローラーはステア解放時間で無効になります。
駆動トルクコントローラーは、イベント全体を通して一定の速度を維持するために用意されています。駆動トルクコントローラーは、ドライブトレインにトルクを適用し、ユーザー定義のパラメータによるP-Dコントローラーを使用して車両速度を制御します。
入口長さの直線道路セクションは、車両モデルが定常状態の直進運転になるように組み込まれています。車両は定常円旋回のコーナーに入り、ハンドルを解放する前に、コーナリングが定常状態に到達できるようになります。
- このテストで計測するステアリングの復元性は、ラック&ピニオン式ステアリングシステムの内部摩擦の影響を受けます。車両ライブラリモデルには、標準要素として摩擦が含まれていません。
- Steer Release timeは、車両のコーナリングが定常状態になり、大部分の過渡応答が沈静化されているように設定する必要があります。適切に設定するには、Steer Release timeを大きな値にしてイベントを1度実行してみます。
- イベントのデフォルト設定では、ハンドルの解放時に車両が定常円旋回の円のおよそ4分の1を走行したことになります。
- 車両のヨー速度は、ハンドルの解放後に車両がどの程度まっすぐに走行しているのか測定するのに適しています。
アタッチメント
イベントは標準のイベントアタッチメントを使用します。Model Wizardを使用してモデルを構築している場合、アタッチメントは自動的に定義されます。アタッチメントには、イベントが解析を実行するために必要な最小限のデータが格納されています。アタッチメントは、大半のイベントで標準です。
データセット
このシステムでは、Steer Release in a Turn eventを記述するデータを収めたデータセットが1つ使用されています。このイベントを使用すれば、横加速度、円の半径、旋回方向(左または右)、およびステア解放時間を設定できます。初期速度、ホイール回転速度および地面の高さは計算された値で、変更できません。
フォーム
フォームは、イベントのデータを変更する必要のある唯一の場所です。変更できるパラメータは、横加速度、円の半径、旋回方向(左または右)、およびステア解放時間です。地上のz座標は計算値です。タイヤデータフォームでホイール重心のZ位置とタイヤ転がり半径を使用して計算されます。
グラフィックス
1つのグラフィックスがイベントに定義されています。グラフィックスは、路面グラフィックスを定義し、ユーザーが入力する必要はありません。グラフィックスの詳しい説明をここに記載します。
図 5.
ジョイント
Steer release in a turnイベントには1つのボールジョイントがあります。このジョイントは、ダミーボディをステアリングラックに結合します。特定のイベントがADAMSで機能できるように、このジョイントが用意されています。モデルを手動で構築する場合は、ダミーボディをステアリングラックに結合します。
マーカー
マーカーが1つイベント内に含まれています。経路の原点は、スキッドパッドグラフィックスの原点で、車両ボディのCGになるようにパラメータで定義されます。マーカーはポイントを指し示し、ポイントにはパラメータのロジックが含まれます。
モーション
3つのモーションがイベントに組み込まれています。車両に対するステアリングモーションは、ステアコントローラーによって提供され、ステアリングコラムを車体に接合する回転ジョイントに作用します。モデルにステアリングコラムがない場合、このジョイントはステアリングラック入力軸と車体の間で機能します。
前輪と後輪のモーションは、ホイールハブをナックルに結合する、ホイールスピンドルの回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動解析でタイヤが回転できるように、当初の静解析の後、このモーションは非アクティブになります。
ポイント
2つのポイントがイベント内で定義されています。すべてのポイントを使用してスキッドパッドのグラフィックスが作成されます。ポイントには、それらのX、Y、Zの位置を定義するパラメータのロジックが格納されます。ポイントは変更しないでください。
ソルバー変数
Steer Release in a Turn eventは、1つのソルバー変数のSteer Path変数のみで構成されています。この変数は、必要な経路に沿って走行するためにハンドルに入力を適用するユーザーサブルーチンを呼び出します。
- 5020
- ブランチID。5020は、Steer release in a turnイベントです。
- 70000000
- ドライバーモデルコントローラーデータを記述したソルバー配列のID。この配列は、ステアコントローラーシステムにあります。
- 70000100
- 車両情報を含む車両データ配列のID。この配列は、ステアコントローラーシステムにあります。
- 30
- 円の半径の値。
Templates
このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。テンプレートは、</Model>コマンドの後にソルバーデックに挿入され、イベントの実行を制御します。
<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
<Motion_Joint
id = "{wh_motion.idstring}"
expr = "VARVAL({sv_path.idstring})"
/>
<Simulate
analysis_type = "Transient"
end_time = "{ds.release_tim.value}"
print_interval = "0.02"
/>
<Deactivate
element_type = "MOTION"
element_id = "{wh_motion.idstring}"
/>
<Reference_Variable
id = "{sv_path.idstring}"
type = "EXPRESSION"
expr = "0.0"
/>
<Simulate
analysis_type = "Transient"
end_time = "{{ds.release_tim.value}+5}"
print_interval = "0.02"
/>
<Stop/>参考資料
ISO +17288-1-2011 - Passenger cars - Free-steer behaviour - Part 1:Steering-release open-loop test method