Throttle-off Turn-in
Throttle-off Turn-in eventは、定常状態で定常円旋回している車両の動特性、コーナリングイベント中に駆動トルクが突然消失した場合の車両の反応、および舵角が漸増する車両の反応をシミュレートします。このイベントには、車両が定常状態になるための短い直線、一定半径の円、スロットルの解除および、舵角の漸次増加が含まれています。このイベントは、幹線道路の出口ランプで旋回の半径が徐々に減少する場合の操縦をシミュレートするように設計されています。車両およびタイヤの適切な出力リクエストが組み込まれています。結果をプロットするために、プロットテンプレートが用意されています。
このイベントはThrottle-off Corneringと同様です。
図 1. Throttle-off Turn-in event
図 2. Throttle-off Turn-in eventの上面図
説明
このイベントは、MotionView Assembly Wizardを使用して構築したフルビークルモデルで動作するように設計されています。Task Wizardを使用して追加したこのイベントは、自動的にモデルに付加されます。また、イベントのアタッチメント方式に厳密に従っていれば、手動で構築したモデルでもこのイベントを使用できます。
| 入力 | 単位 | 説明 |
|---|---|---|
| 横方向の加速度 | Gs | イベントの一定半径旋回の部分で、車両に発生する事前設定の横加速度です。 |
| Circle Radius | メートル | 円部分の半径: イベントの一定半径旋回の部分では車両の重心がこの円に沿って走行します。 |
| Turn direction | 左または右 | イベント時の車両の旋回方向です(ドライバーから見た方向)。 |
| 車両速度 | マイル/時 | 定義された円半径で、所定のLateral Accelerationを発生させるように内部計算された速度です。以下の式を使用します: |
| Throttle delay | 秒 | スロットルコントローラーが駆動トルクを解除し始める、シミュレーションにおける絶対時間です。 |
| Throttle duration | 秒 | スロットルコントローラーが駆動トルクを完全に解除するのに要する時間の長さです。 |
| Steer delay | 秒 | 舵角の増加し始める、シミュレーションにおける絶対時間です。 |
| Steer ramp rate | 度/秒 | ステア遅延時間での舵角の変化率(度/秒)です。 |
| Step size | 秒 | 秒単位での出力データステップサイズです(この数値が.02の場合、データは.02秒ごとに出力されます)。 |
| Ground Z coordinate | mm | 計算による地上Z座標の位置です(変更しないでください)。 |
イベントのシーケンスは次のとおりです:
- 時間
- 説明
- 0
- 静解析 - モデルに対して静解析が実行されます。
- 0+
- 静解析後 - 車両を地面に固定している2つのジョイントと、ホイールをスピンドルに固定している4つのモーションが解除されます。
- 変動
- 方向転換 - 車両は定常円旋回のコーナーに入ります。
- イベント入力に従う
- スロットル遅延時間 - スロットル継続時間の間に車両の駆動トルクが0まで減少します。
- イベント入力に従う
- ステア遅延時間 - 半径が徐々に減少するステアイベントをシミュレートするために、ステア増加率でステアリングホイール角を大きくします。
- ステア遅延時間+10秒
- イベント終了 - ステア遅延時間が経過した10秒後にイベントが終了します。終了時間を異なる時間にする必要がある場合は、イベントテンプレートで編集できます。
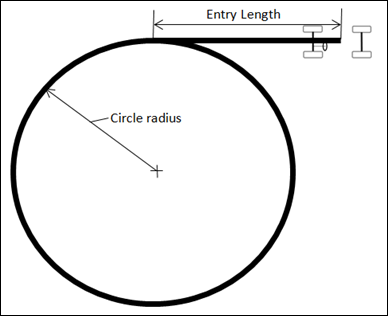
図 3. Throttle-off Turn-in
このイベントは、車両が拘束道路で、半径が徐々に減少するカーブである出口ランプを出る場合をシミュレートするように設計されています。スロットル遅延時間は、ドライバーがスロットルから足を離したときの時間です。ステア変化時間は、半径が減少し始めるときの時間です。シミュレートするテスト条件または現場条件に適合するように、イベント時間および円の半径に順番を割り当てる必要があります。Altair参照モデルを使用してシミュレートした場合、このイベントでは、当該イベントにおいて予想される横および前後の重量転移が示されます。
横加速度、円の半径、スロットル遅延、およびスロットルステップ期間は、イベントデータフォームで変更できます。旋回方向を左または右に変更することもできます。地上z座標は計算値なので変更できません。
このイベントにはステアコントローラーおよび駆動トルクコントローラーがあります。ステアコントローラーは、車両に対するステアリング制御を提供します。駆動トルクコントローラーは、スロットル遅延時間に至ってトルクが下降し始めるまで、イベント中に駆動系のトルクを使用して一定速度を維持します。どちらのコントローラーも、車両の特性に適合するよう調整する必要があります。これらのコントローラーは、各イベントに組み込まれているため、イベントごとに設定する必要があります。
イベントを定義するために9タイプのモデリング要素コンテナーが使用されています(下記参照)。イベントには、3つのサブシステム(Output Requests、Steer controller、Drive torque controller)も含まれています。
アタッチメント
イベントは標準のイベントアタッチメントを使用します。Model Wizardを使用してモデルを構築している場合、アタッチメントは自動的に定義されます。アタッチメントには、イベントが解析を実行するために必要な最小限のデータが格納されています。アタッチメントは、大半のイベントで標準です。データセット
システム内では1つのデータセットが使用され、そこにはイベントの動作を記述するために使用するデータが格納されています。このイベントでは、Lateral Acceleration、Circle Radius、Throttle delay、Throttle duration、Steer delay、Steer ramp rate、およびStep sizeを設定できます。Turn Directionは、要件に応じて、LeftまたはRightに設定可能です。初期車両速度、ホイール回転速度、および地面の高さは内部計算された値で、手動では変更できません。フォーム
Formは、Throttle-off turn-inイベントを変更する唯一の場所です。変更できるパラメータは、Lateral Acceleration、Circle Radius、Throttle delay、Throttle duration、Steer delay、Steer ramp rate、およびStep sizeです。Turn Directionは、要件に応じて、LeftまたはRightに設定可能です。Ground z Coordinateは、内部計算された値で、Tire Data Formのホイールの左前輪の重心のZ位置とタイヤ転がり半径を使用して計算されます。グラフィックス
1つのグラフィックスがイベント内に定義されています。グラフィックスは、路面グラフィックスを定義し、ユーザーが入力する必要はありません。
スキッドパッドグラフィックスは走行経路を表現するために含まれており、Throttle-off turn-inのForm内のデータを使用してパラメータで定義されています。スキッドパッドグラフィックスは、イベントが根本的に変更されないかぎり、編集する必要はありません。
ジョイント
Throttle-off turn-inイベントには1つの球ジョイントが含まれています。このジョイントは、ダミーボディをステアリングラックに結合します。このジョイントは、特定のイベントをADAMSで機能させるために含まれています。モデルを手動で構築する場合は、ダミーボディをステアリングラックに結合します。マーカー
Throttle-off turn-inイベントには1つのマーカーが含まれています。経路の原点は、スキッドパッドグラフィックスの原点で、車体の重心になるようにパラメータで定義されます。マーカーはポイントを指し示し、ポイントにはパラメータのロジックが含まれます。モーション
3つのモーションがイベントに組み込まれています。ステアリングモーションは、ステアコントローラーによって提供され、ハンドルを車体に結合する回転ジョイントに作用します。ステアリングコラムがモデルに含まれない場合、ジョイントがステアリングラックのインプットシャフトと車体の間に作用します。
Front Wheel MotionおよびRear Wheel Motionは、ホイールのハブをナックルに繋ぐホイールのスピンドル回転ジョイントに作用します。ホイールがナックルに固定されていることから、当初のこのモーションは0なので、モデルは静的に収束します。動解析中にタイヤが回転できるように、静解析の後、モーションは非アクティブ化されます。
ポイント
2つのポイントがイベント内で定義されています。すべてのポイントを使用してスキッドパッドのグラフィックスが作成されます。ポイントには、それらのX、Y、Zの位置を定義するパラメータのロジックが格納されます。ポイントは変更しないでください。ソルバー変数
Throttle-off turn-inイベントは、1つのソルバー変数、Steer Path Variableのみで構成されています。この変数は、希望の経路に沿って走行するためにハンドルでの入力を適用するユーザーサブルーチンをコールします。Templates
Throttle-off turn-inイベントタスクにはテンプレートが含まれています。このテンプレートはソルバー固有で、MotionSolveテンプレートのみがドキュメント化されています。このテンプレートは、</Model>コマンドの後にソルバーデックに挿入されて、このイベントの実行を制御します。<ResOutput
angle_type = "YPR"
/>
<ResOutput
mrf_file = "TRUE"
/>
<ResOutput
plt_file = "TRUE"
/>
<H3DOutput
switch_on = "TRUE"
increment = "1"
/>
<ResOutput
abf_file = "TRUE"
/>
{if (tire_dataset.opt_omega.ival ==1)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_frnt_wheel.r.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.l.idstring}"
/>
<Deactivate
element_type = "MOTION"
element_id = "{mot_rear_wheel.r.idstring}"
/>
{if (tire_dataset.opt_omega.ival ==2)}
<!--Initial static analysis -->
<Simulate
analysis_type = "Static"
end_time = "0.0"
/>
{endif}
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_1_body.idstring}"
/>
<Deactivate
element_type = "JPRIM"
element_id = "{j_clamp_2_body.idstring}"
/>
<Motion_Joint
id = "{wh_motion.idstring}"
expr = "VARVAL({sv_path.idstring})"
/>
<Simulate
analysis_type = "Transient"
end_time = "{ds.str_dly.value+10}"
num_steps = "{(ds.str_dly.value+10)/ds.step.value}"
/>
<Stop/>参考資料
ISO 9816-2006 Passenger cars — Power-off reaction of a vehicle in a turn