機械式加速度計を使用して、ロケットの試験スレッドの加速度を測定します。この測定では、線形のスプリングダンパシステムを扱います。以下に図を示します。剛性と減衰を調整することで、感知された加速度が許容時間内で推定されるように加速度計を設計できます。
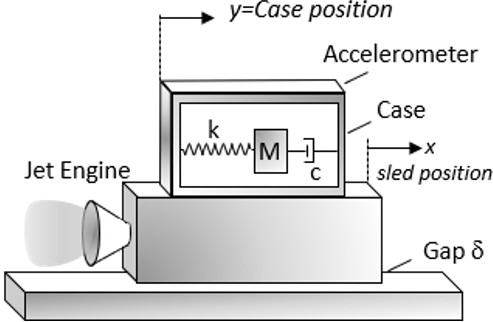
図 1.
- 目的
- ターゲット値
からのシステム応答
の偏差を次のように計算できます:
-
(1)
(2)
- この問題は次のように定式化できます:
-
-
- 設計変数
- スプリングの剛性
と、その減衰
が設計変数です。
- 結果
- スプリングの剛性と減衰を適切に選択することで、目的の時間フレーム内で応答するように加速度計を設計できます。
-
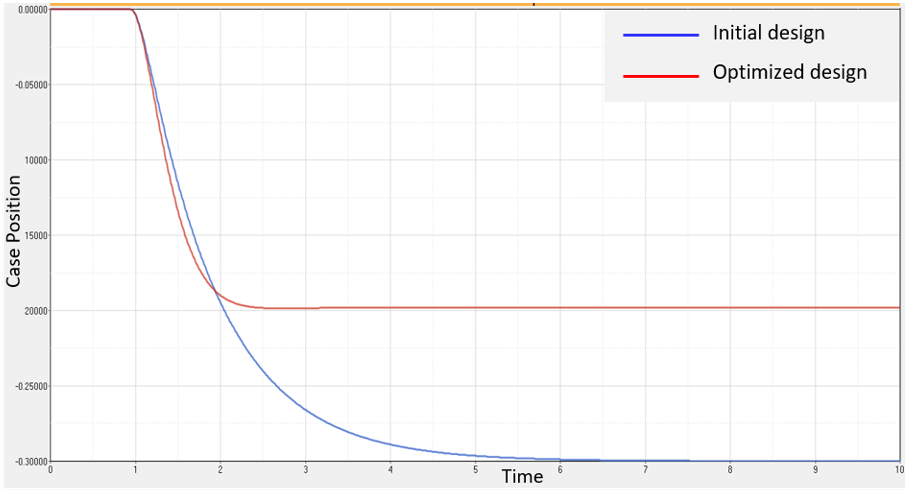
図 2.