応用分野7:エネルギー消費の最小化
多くの場合、機械にはタスクを繰り返し実行することが求められています。その一例が製造ラインのロボットです。ロボットは、所定の場所にある部品を拾い上げて、別の場所に配置します。次の図に示すデルタロボットは、このようなロボットに該当します。
デルタロボットは、エンドエフェクターのプラットフォームが機械のベースと平行に移動できるようにするパラレルロボットです。この種類のロボットは、パッケージ産業のピックアンドプレース用途や電子産業の高精度組み立てなどで幅広く使用されているほか、高速動作が可能であることから3Dプリンタでも使用されています。以下に示すのは、並進自由度が3のエンドエフェクターを備えた、自由度が3のモデルです。
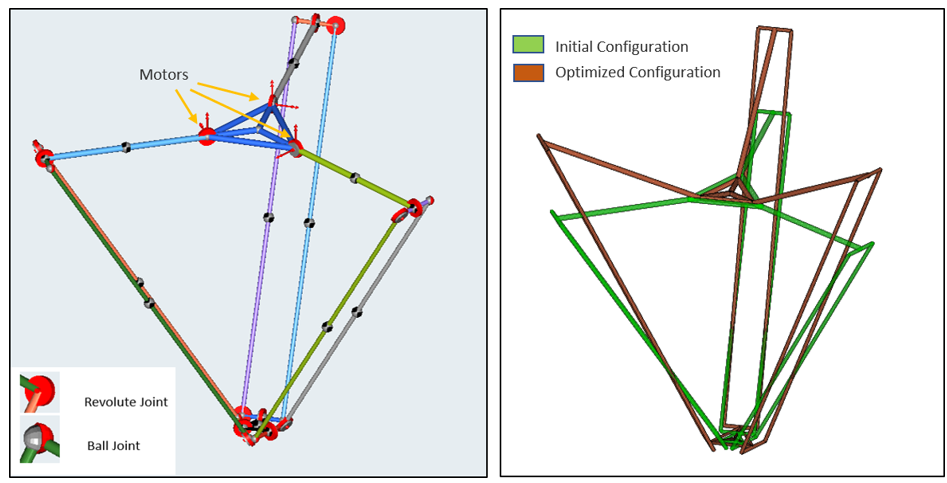
図 1.
- 目的
- 指定した経路をエンドエフェクターが移動するときの消費エネルギーが最小になるロボット構成を合成します。
- 設計変数
- このデルタロボットには5つの設計変数があります。それを以下の図に示します。
-
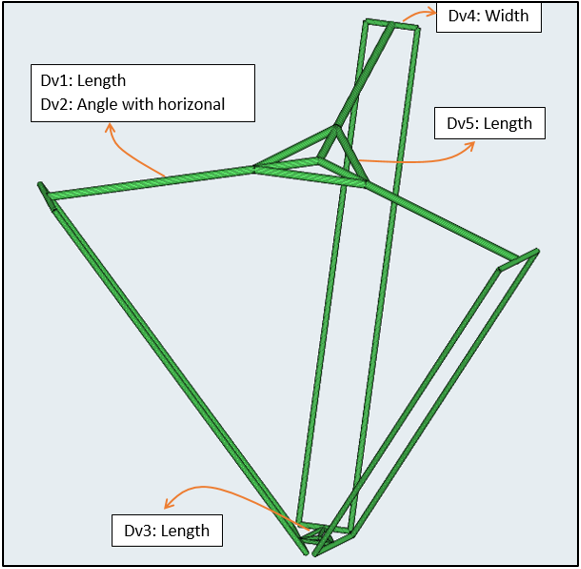
図 2. - 結果
- 3基のモーターによって消費されるエネルギー合計が30%削減されました。最適な設計構成では、モーター1基のピークトルクも57%以上削減されています。
-
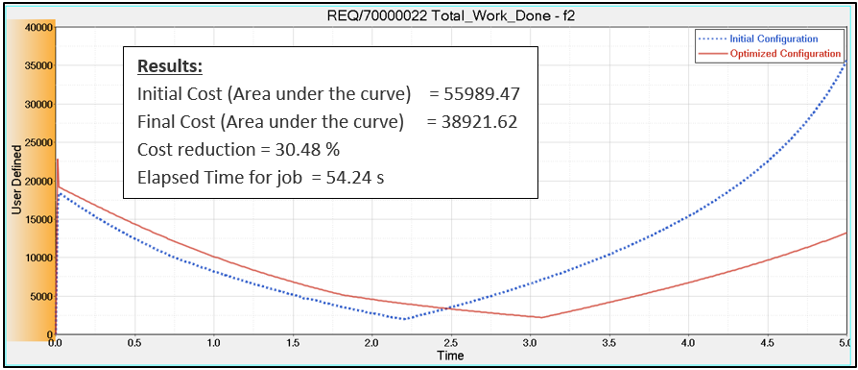
図 3.