汎用TYPE8スプリング(/PROP/SPR_GENE)
スプリングTYPE8は、3つの並進と3つの回転の合計6つの自由度を持つスプリングです。
各自由度は相互に独立しており、特定の剛性に関連付けられます(詳しくは剛性定式化参照)。限界時間ステップの計算には、次の式が用いられ、全ての自由度の最小値が保持されます:(1)
ここで、
- 慣性モーメント
- 関連する剛性
局所スキュー(移動または固定)が指定されない場合、局所座標は節点位置には関係なく全体座標系が用いられます。
この数学的スプリングの物理挙動を理解するためには、2節点のスプリングが一緒につながれていることをイメージしてください。つまり、節点間の独立自由度としての相対的な並進 / 回転のみが考慮されます。 図 1 に解説を示します。
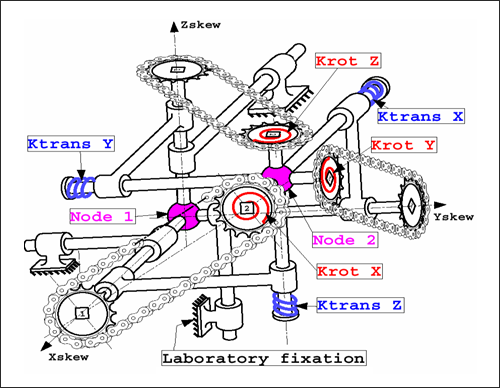
図 1. スプリングTYPE8
図 1. スプリングTYPE8
注: 移動スキューを用いて局所座標系が定義された場合、スプリングTYPE4の局所X軸の挙動を模擬することが可能で、移動スキューを定義する最初の2節点がスプリングの第1および第2節点となります(図 2)。
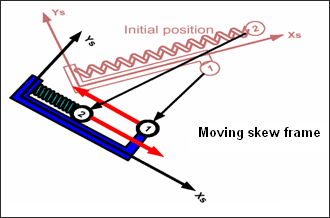
図 2. 局所X方向の変形
ここで、全体の力のつり合いは考慮されますが、全体のモーメントのつり合いはそうでないことが見て取れます。したがって、スプリングは欠落するモーメントが適用されるものに結合されます。一般的には、スプリングTYPE8は、1節点が全ての方向に固定され、2節点が一致する場合の使用を推奨します(2節点が一致する場合、並進剛性はシミュレーションの間に節点が一致に近い状態を保つのに十分な剛性を持つ必要があります)。そうした場合、全体のモーメントのつり合いも考慮されます。
注: 長さが0でないTYPE8スプリングが剛体回転を受けた場合、エネルギー増加が観察されます。長さが0以外の時はスプリングTYPE8。
スプリングTYPE8は一般的に2つのパートの結合のモデル化に用いられます。例えば、ステアリングシステムのピボット点はスプリングTYPE8を用いてモデル化されます。この結合タイプのプロパティモデルでは、併進自由度はやや高い剛性を通してブロックされる必要があり、すべての回転自由度は自由である必要があります。以下はそのような結合の例で、剛性に与えられる値は任意ですが関連する単位系によって調整される必要があります。
注: その移動量は回転に急な増加のある非線形剛性を用いて制限を与えることも可能です(詳しくは剛性定式化参照)。
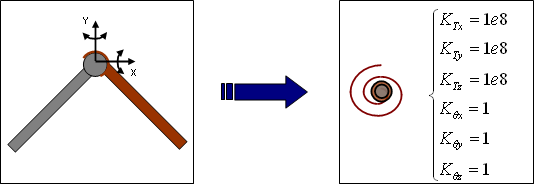
図 3. ヒンジのモデル化(スプリングTYPE8を使用)
詳細については、Radioss Theory Manual内のGeneral Spring Elements (TYPE8)をご参照ください。