RD-E:0903 インターフェースの検討
異なるインターフェースを用いた結果の比較
使用されるオプションとキーワード
- 緩和の値 (デフォルト値は1)
- 減衰される期間(系の最長期間以下)
- 緩和のない場合
- 緩和のある場合
ここで、
- 入力
- = 1
- = 0.2
動的問題(ボール間の接触)は2番目の実行で2番目の Engineファイル(*_0002.rad)により時刻30 msから130 msの実行として考慮されます。
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
- TEST7L_*.rad
- TEST7P_*.rad
- TEST16S_*.rad
- TEST16T_*.rad
- TEST17S_*.rad
- TEST17ST_*.rad
モデル概要
ボールとテーブルは前の定義と同じ特性を持ちます。テーブルの寸法は900 mm x 450 mm x 25 mmでボールの直径は50.8 mmです。
- 問題で用いられたインターフェース
- TYPE16(Lagrange乗数法)タイドまたはスライド
- セカンダリ節点 / メインソリッドの接触
- TYPE17(Lagrange乗数法)タイドまたはスライド
- セカンダリ: 16節点シェル / メイン: 16節点シェルの接触
- TYPE7(Lagrange乗数法)
- セカンダリ節点 / メインサーフェスの接触
- TYPE7(ペナルティ法)
- セカンダリ節点 / メインサーフェスの接触
モデリング手法
TYPE16インターフェースは節点グループ(セカンダリ)と2次要素の曲面(メインパート)の間の接触を定義します。TYPE17インターフェースはサーフェス-サーフェス接触をモデル化するために用いられます。両方のインターフェースでは接触条件を与えるのにLagrange乗数法が用いられ、ギャップは必要ありません。ボールとテーブルの間の接触はタイドまたはスライドが設定されます。ボール同士の間の接触は常にスライドとして考えます。TYPE7インターフェースはメインサーフェスとセカンダリ節点セットとの間に起こる、ほとんどの一般的な接触タイプをシミュレート可能です。サーフェス間のCoulomb摩擦はここではモデル化されず(スライド接触)、ギャップは0.1 mmで固定されます。他のパラメーターはデフォルト値に設定されます。
ペナルティ法のTYPE7インターフェースは16節点厚肉シェル要素には使えません。このため、このケースでは16節点シェルをソリッド要素に代えます(入力ファイルでチェックしてください)。
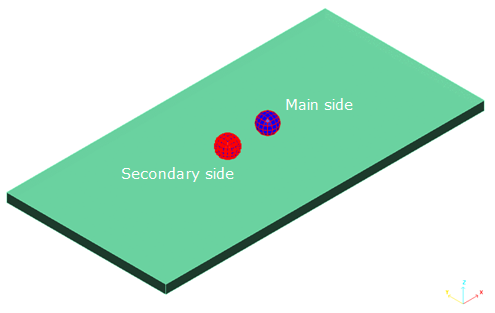
図 1. 接触のためのセカンダリ側とメイン側の定義
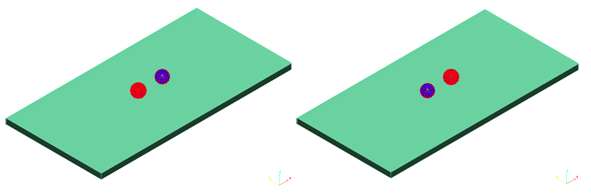
図 2. ペナルティ法を用いたTYPE7インターフェースの対称形状
- インターフェース
- セカンダリ(赤)とメイン(青)オブジェクト
- TYPE16 - タイド
- セカンダリ: 節点
- TYPE16 - スライド
- セカンダリ: 節点
- TYPE17 - タイド
- セカンダリ: 16節点シェル
- TYPE17 - スライド
- セカンダリ:16節点シェル
- TYPE7 - Lagrange乗数法
- セカンダリ: 節点
- TYPE7 - ペナルティ法
- セカンダリ: 節点
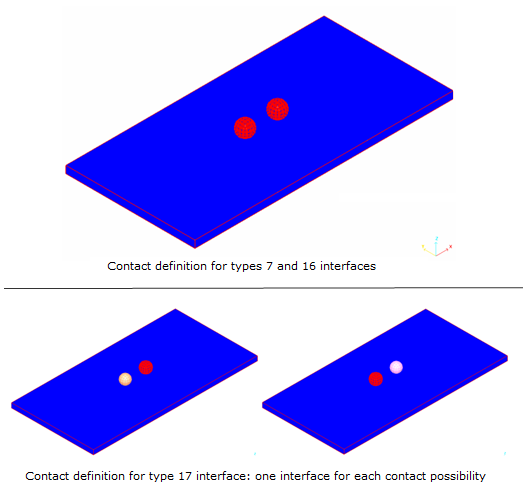
図 3. ボール / テーブル接触のためのセカンダリ側とメイン側のオブジェクト定義
- インターフェース
- セカンダリ(赤)とメイン(青)オブジェクト
- TYPE16 - タイド
- セカンダリ: 節点
- TYPE16 - スライド
- セカンダリ: 節点
- TYPE17 - タイド
- セカンダリ:16節点シェル
- TYPE17 - スライド
- セカンダリ:16節点シェル
- TYPE7 - Lagrange乗数法
- セカンダリ: 節点
- TYPE7 - ペナルティ法
- セカンダリ: 節点
プレローディング:静的つり合いに至る準-静的重力荷重
陽解法積分スキームは節点加速度の計算から始まります。これは動的荷重のシミュレーションには効率的です。しかしながら、動的解法を通した準-静的シミュレーションでは、静的つり合いに向けて収束させるために動的効果を最小化して動的解析の前のプレローディングのケースを記述することが必要になります。このように、モデルへの重力荷重の準-静的解は過渡応答の定常状態部分になります。
結果
衝突の間のボール間の運動エネルギー伝達

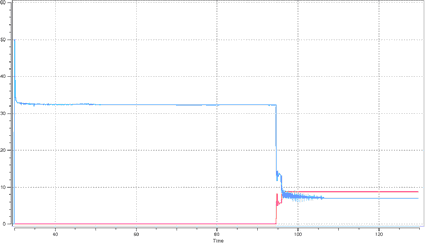 図 4. TYPE17インターフェース. 2次曲面間の接触 ボール/テーブル接触: タイド / ボール/ボール接触: スライド
図 4. TYPE17インターフェース. 2次曲面間の接触 ボール/テーブル接触: タイド / ボール/ボール接触: スライド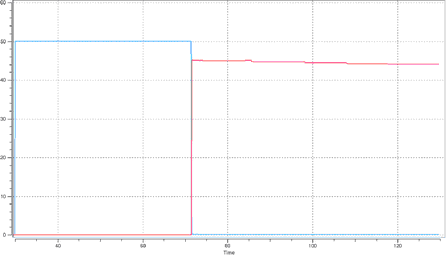 図 5. TYPE17インターフェース. 2次曲面間の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライド
図 5. TYPE17インターフェース. 2次曲面間の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライド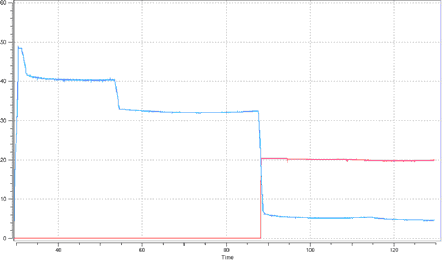
図 6. TYPE16インターフェース. 節点 / 2次曲面間の接触 ボール/テーブル接触: タイド / ボール/ボール接触: スライド
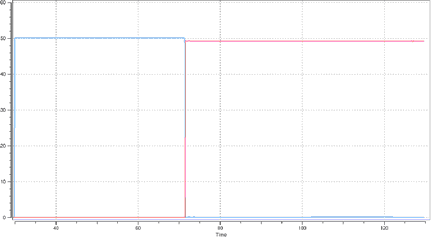 図 7. TYPE16インターフェース. 節点 / 2次曲面間の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライド
図 7. TYPE16インターフェース. 節点 / 2次曲面間の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライド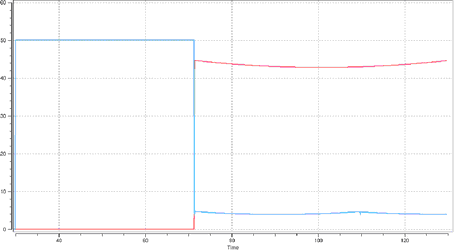 図 8. TYPE7インターフェース:Lagrange乗数法. 節点 / 線形曲面の接触(スライド接触)
図 8. TYPE7インターフェース:Lagrange乗数法. 節点 / 線形曲面の接触(スライド接触)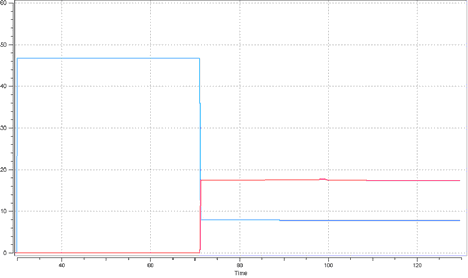 図 9. TYPE7インターフェース:ペナルティ法. 節点 / 線形曲面の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライド
図 9. TYPE7インターフェース:ペナルティ法. 節点 / 線形曲面の接触 ボール/テーブル接触: スライド / ボール/ボール接触: スライドまとめ
| インターフェース16タイド | インターフェース16スライド | インターフェース17 タイド |
インターフェース17スライド | インターフェース7 Lagrange乗数: |
インターフェース7 ペナルティ |
|
|---|---|---|---|---|---|---|
| サイクル | 241392 | 241385 | 241387 | 241385 | 241385 | 773099 |
| エネルギー誤差 | -30.8% | -1.4% | -55.5% | -10.8% | -1.2% | -46.1% |
| 回転 | あり | なし | あり | なし | なし | なし |
| 運動量伝達 | 部分的 | ほぼ完全 | 部分的 | 良い | 良い | 部分的 |
| 2次曲面 | メイン側 | メイン側 | メインとセカンダリ側 | メインとセカンダリ側 | なし | なし |
ペナルティ法のTYPE7インターフェースでは非弾性衝突が現れています。衝突後、それぞれのボールは初速度の約半分になります。運動量伝達は部分的ですが、アワグラスエネルギーやエネルギー低下の評価に反して、インターフェースの剛性を上げることによりこれは改良されます。
回転のシミュレーションを考慮するためにタイドオプションを用いたインターフェースではエネルギー誤差がより注目できます。
この検討では、弾性のボールの衝撃のモデル化に対して、数値アルゴリズムが非常に敏感であることを示しています。インターフェースによって、問題の運動エネルギーと運動量伝達の満足度の高低があります。TYPE16インターフェースで良い結果を得ることが可能です。