RD-E:5501 ファンブレードの回転の初期設定
Radiossの/LOAD/CENTRIオプションは、ファンブレードに遠心力場を生成するために使用されます。
2番目のEngineファイルで、初期速度がモデルに付与され、/SENSORを用いて/LOAD/CENTRIの力が非アクティブ化され、強制速度をブレードの回転中心に付与します。
使用されるオプションとキーワード
- 回転する構造内の遠心力プレロード
- 軸周りの回転速度
- センサーアクティブ化
- 陰解法の後に陽解法シミュレーション
- 陰解法シミュレーションオプション(陰解法)
- 遠心力場(/LOAD/CENTRI)
- 軸周りの回転速度(/INIV/AXIS/Z/1)
- ローカルアクティブで非アクティブ(/SENSOR/TIME、/SENSOR/NOT)
- Engineファイルでの境界条件削除(/BCSR)
- Johnson-Cook破壊モデル(/FAIL/JOHNSON)
遠心力場は/LOAD/CENTRIオプションと線形ランプ関数(最大値は104.72 )を用いてブレードに付与されます。定常状態の回転条件が求められるため、/LOAD/CENTRIオプションIvar=1(速度の変化は考慮されない)を使用します。
2番目のEngineファイルがスタートすると、一定である104.72 の初期強制回転速度がブレードに付与されます。強制速度(/IMPVEL)はt=0.1秒において、時間アクティブ化センサー(/SENSOR/TIME)でアクティブにされます。センサーTYPE=NOT(/SENSOR/NOT)は、強制速度がオンにされた際に遠心力をオフにするために使用されます。/SENSOR/NOTのアクティブ化の状態は、それが参照するセンサーと逆であり、したがって、時間 = 0から0.1秒でオンになります。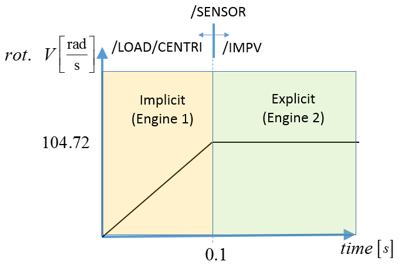
図 1.静的つり合いでの陰解法ソリューションをキープするため、完全に拘束された境界条件(/BCS)が、ブレードのベース節点を結合する剛体のメイン節点上で使用されます。この完全に拘束された境界条件は、回転が始まった際に2番目のEngineファイルで削除されます。
| コマンド | コメント | |
|---|---|---|
| 出力情報 | /PRINT/-1 /IMPL/PRINT/NONL/-1 |
非線形の計算について周波数を出力。 |
| 線形ソルバーの解法 | /IMPL/SOLVER/3 | N=3(直接法ソルバーの場合)SMPではBCSを、SPMDではMUMPSを使用。 非線形反復でも線形ソルバーが使用されます。それぞれの非線形反復サイクルでを解くために使用されます。 |
| 非線形ソルバーの解法 | /IMPL/NONLIN/1 0、12、0.01、0.01 |
N=1(デフォルト)(修正ニュートン法と用いられる) Itol=12: 終了条件として、エネルギー(許容値Ioli=0.01)および力(許容値Iolj=0.01)で相対残差を使用します。 |
| /IMPL/LSEARCH/1 20, 1.0E-03 |
非線形解析向けのラインサーチ手法です。 N=1: エネルギーの残差を最小限に抑える標準的なラインサーチ MAX_ls=20(デフォルト): ラインサーチの最大反復回数は20 TOL_ls=1e-3(デフォルト): ラインサーチ反復の許容値は1e-3 |
|
| 時間ステップ | /IMPL/DTINI 0.01E+00 |
非線形陰解法解析の初期時間ステップを定義するために使用します。 |
| /IMPL/DT/STOP 0.01E-04、0.03E+00 |
陰解法解析は、DT_min=0.01e-4で停止し、DT_max=0.03に達すると、計算はこの最大時間ステップで継続されます。 | |
| /IMPL/DT/2 6,0.00E+00、20、0.67E+00、0.11E+01 |
陰解法時間ステップコントロール 望ましい収束の反復回数は6(デフォルト)。 収束の最大反復回数は20(デフォルト)に設定。 時間ステップを減少させる係数は0.67(デフォルト)に設定。 時間ステップを増加させるための最大スケール係数は1.1(デフォルト)に設定。 |
# initialize the explicit rotation
/RUN/fbo_case/2
0.200
…
# apply initial rotational velocity
/INIV/AXIS/Z/1
0
0 0 0 104.72
1 3650
# remove z rotation boundary condition on main node of rigid body (node ID 5)
/BCSR/ROT/Z
5 入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要

図 2. ケース付きのブレード
単位: mm、s、Mg、N、 MPa
- ブレードのチタン材料のプロパティ:
- 密度
- ヤング率
- 113400
- ポアソン比
- 0.342
- 降伏応力
- 1098
- 塑性硬化パラメータ
- 1092
- 塑性硬化指数
- 0.93
- ケースのスチール材料のプロパティ
- 密度
- ヤング率
- 210000
- ポアソン比
- 0.3
- 降伏応力
- 200
- 塑性硬化パラメータ
- 450
- 塑性硬化指数
- 0.5
- 最大応力
- 425
- ブレードの中央は、Rzを除いて全方向で拘束
- 強制回転速度 = 1000 = 104.72
- ケースのエッジは、X、Y、Z方向で完全に拘束されている
モデリング手法
本解析の目的は、1000 RPMの回転からのブレードの遠心力場と応力を初期設定することにあります。遠心力の初期設定を行う1つの方法は、回転速度を0から1000 RPMにゆっくりと増やしていくことです。しかしながら、陽解法のシミュレーションについては、この方法だと非常に長い時間がかかります。シミュレーション時間を短縮するために、陰解法ソリューション法とRadiossの/LOAD/CENTRIオプションを使って遠心力場を作成することができます。2番目のEngineファイルを用いて初期回転速度がブレードに付与され、/SENSORが遠心力場をオフにし強制速度をオンにするために使用されます(/IMPVEL)。ブレードは回転しており、応力は一定のまま、すなわちブレードは定常状態の回転にあります。
結果
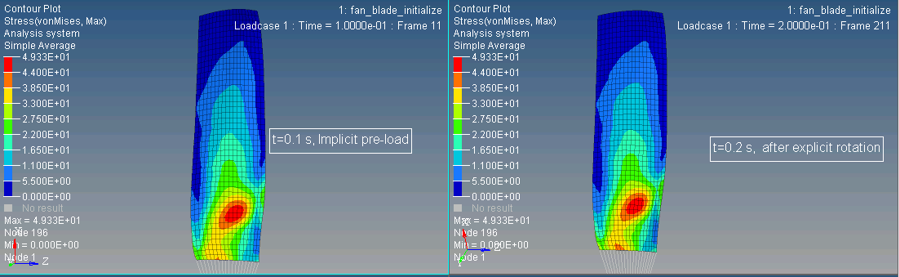
図 3. 陰解法と陽解法の回転で遠心力の載荷後の応力の比較
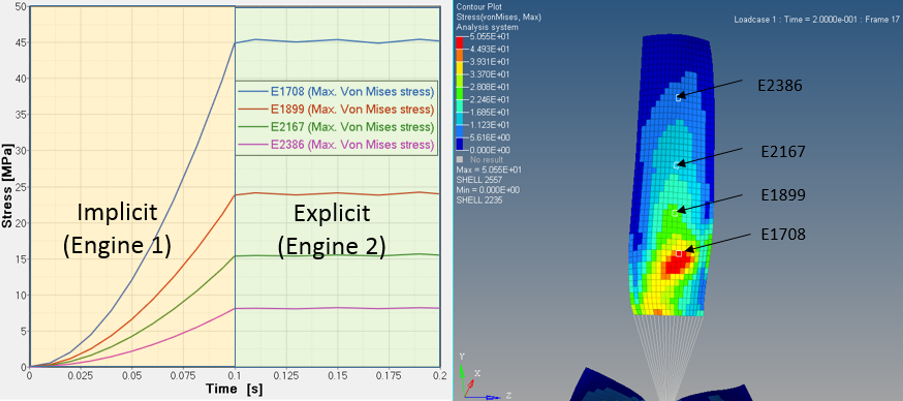
図 4. 要素応力の時刻歴プロット
まとめ
ブレード上の力は正しく付与され、ブレードは定常状態条件で回転し、鳥または雹によるブレードの衝撃のシミュレーションが完了されます。