陰解法の例題
浅い円筒ルーフがその中央点に強制速度を受けます。解析では陰解法アプローチを用います。
この例題の目的は、1つの不安定性を持つスナップスルー問題を検討することにあります。したがって、構造は荷重の下で曲げられます。結果は参照の解 と比較されます。1 孤長増分法を用いた陰解法のストラテジーが示されます。
使用されるオプションとキーワード
限界点が主な非線形性を引き起こします。したがって、静的非線形解析が孤長変位のストラテジーを用いて実行されています。時間ステップが変位ノルム制御によって決められます。荷重変位曲線の0の接線で特性化される限界点を超え、非線形経路の増加と減少部分を表すため、小さな時間ステップが必要で、これは最大値の設定で保障されます。
それぞれの非線形反復サイクルでAx=b を解くソルバーの手法が必要です。これは/IMPL/SOLVERで定義されます。
- 線形陰解法オプション
- 線形ソルバー
- 直接法ソルバーMUMPS
- 前処理法
- 分解された近似逆行列
- 最大反復回数
- 系の次元(NDOF)
- 終了基準
- 力の相対残差
- 終了基準の収束判定
- マシンの精度
*_001.radに設定される入力の陰解法オプションは:
- /IMPL/PRINT/NONL/-1
- 非線形反復の出力間隔
- /IMPL/SOLVER/2 5 0 0 0.0
- ソルバー法(Ax=bを解く)
- /IMPL/NONLIN 3 1 0.20e-3
- 非線形静解析の計算
- /IMPL/DTINI 10
- 初期荷重時増分を決める初期時間ステップ
- /IMPL/DT/STOP 0.5 10
- 時間ステップの最小と最大値
- /IMPL/DT/2 6.0 20 0.8 1.05
- 時間ステップコントロール法 2 – 孤長増分 + ラインサーチが収束の加速と制御のために用いられます
陰解法オプションの詳細についてはRadiossStarter入力をご参照ください。
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
本例題で使用されるモデルファイルは下記のとおり:
SNAP_IMP*.rad
モデル概要
真っ直ぐな辺がピン拘束された浅い円筒ルーフがその中央点に強制速度を受けます。
単位: mm、ms、g、N、 MPa
形状データの寸法は図 1のとおりです:
- l
- 254 mm
- R
- 2540 mm
- シェル厚
- t = 12.7 mm
- 0.1 rad
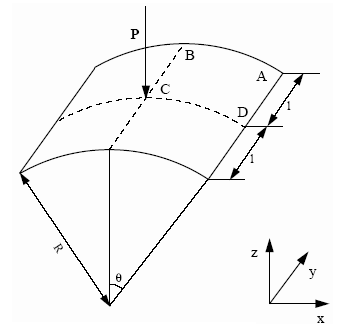
図 1. 問題の形状データ
用いられた材料は線形弾性則に従い、以下の特性を持ちます:
- 材料特性
- 初期密度
- 7.85x10-3
- ヤング率
- 3102.75
- ポアソン比
- 0.3
モデリング手法
陽解法の検討で記述された問題のモデリングは変わっていません。
陰解法計算では特定の陰解法パラメータがEngineファイル*_001.radで/IMPLで始まるオプションを用いて定義される必要があります。
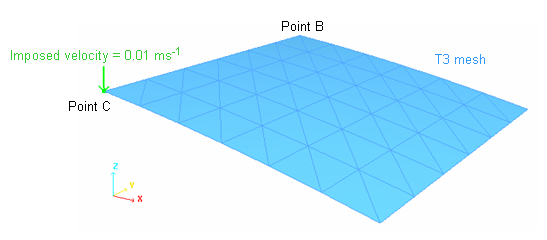
図 2. 問題の概要(1/4のシェルがモデル化されています)
図 2. 問題の概要(1/4のシェルがモデル化されています)
強制速度が陰解法を用いて考慮されます。ここで、一定の入力曲線が計算時間に一致する強制変位に変換されます。
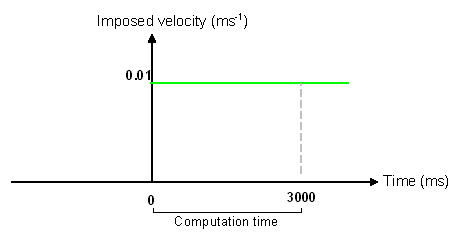
図 3. 強制速度曲線
図 3. 強制速度曲線
結果
曲線とアニメーション
対称性のため全荷重の1/4のみが与えられます。このため、時刻歴として示される剛体の力 Fzは力 Pを得るために4倍される必要があります。
図 4 はスナップスルーの荷重変位曲線の特性を表します。この図はシェルの点Cにおける反力を鉛直変位の関数としてプロットしたものです。陰解法の結果は実験データと比較されます。
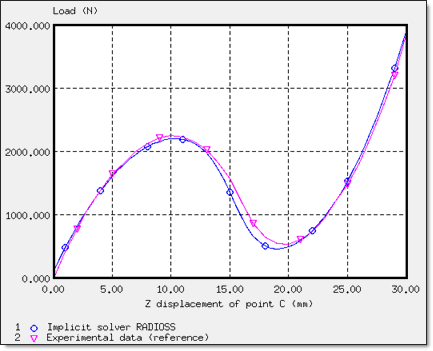
図 4. 点Cでの荷重P vs 変位
図 4. 点Cでの荷重P vs 変位
10 ms以下の時間ステップで(最大値は陰解法/IMPL/DT/STOPオプションで設定されます)、参考文献で得られた良い結果と、Radiossとの一致が達成されます。精度は、CPU 時間は増加しますが、最大時間ステップを減らすことにより改良されます。
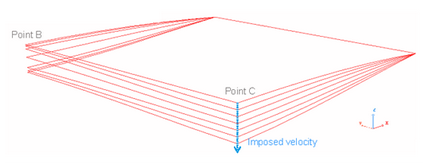
図 5. スナップスルーの間の変形形状
図 5. スナップスルーの間の変形形状
陰解法と陽解法の比較結果
陰解法計算を通して得られた荷重変位曲線(時間ステップ限度を0 msに設定)と陽解法計算は非常に近くなっています。最大時間ステップ100 msでは荷重の非線形経路を正確に表現することはできません。しかし、最終静的荷重は正確です。
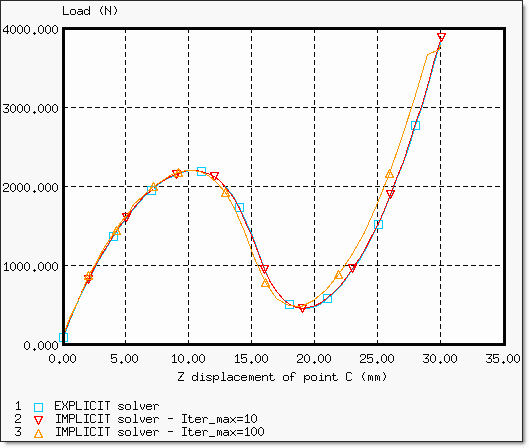
図 6. 陰解法と陽解法で得られた荷重変位曲線
図 6. 陰解法と陽解法で得られた荷重変位曲線
陽解法と陰解法(最大時間ステップを10 msに設定)アプローチの間の計算時間の比較を表 1に示します:
| 陰解法ソルバー | 陽解法ソルバー | |
|---|---|---|
| 正規化されたCPU | 1 | 2.45 |
| サイクル (正規化) | 1 | 237 |
陰解法計算の比較で、最大時間ステップを10 msとした場合と、最大時間ステップを100 msに固定した場合で、節約されたCPU時間はおよそ4倍になっています。
参考文献
1 Finite Element Instability Analysis of Free Formed Shells.Report 77−2, 1977, Norwegian Institute Of Technology, Trondheim, HORRIGMOE G.