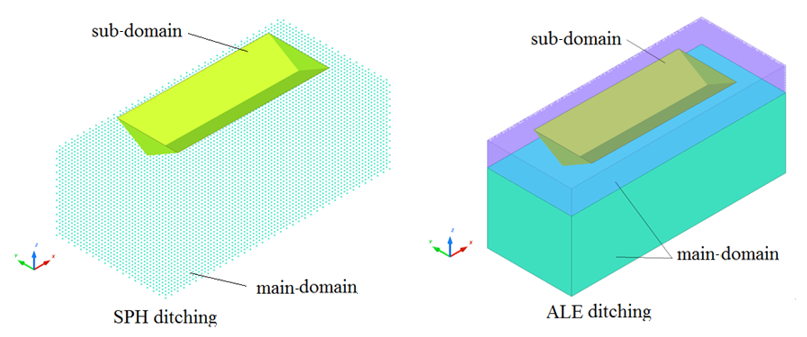
マルチドメインモデルでは変形可能な三角柱を使用したため、結果を、RD-E:2201 ALE および RD-E:2202 SPH着水モデルの結果と直接比較することはできません。そのため、マルチドメインモデルを単一ドメインとして再実行し、比較のための結果を得ました。
加速度の結果は、CFC 60(-3db)フィルターを使用してフィルタリングされ、その後、単一ドメインとマルチドメインモデルの間で比較されました。
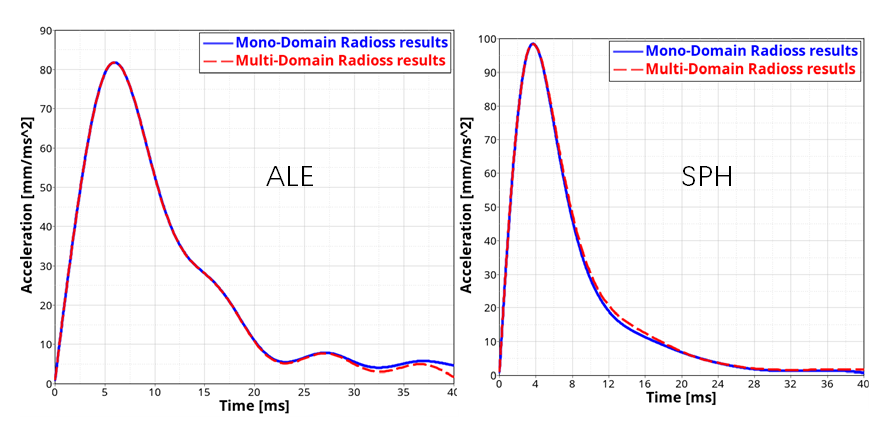
図 3. 単一ドメインとマルチドメインの比較
マルチドメインでの時間ステップは、単一ドメインと比べて大きくなっています。
- 時間ステップ
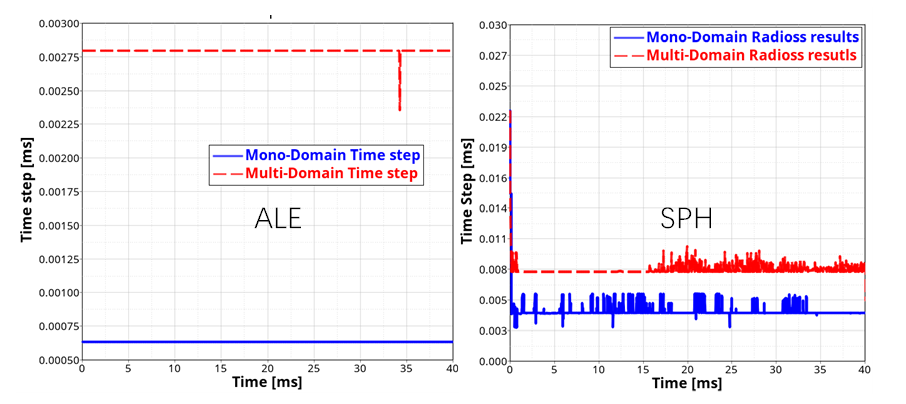
図 4. 単一ドメインとマルチドメインの比較
理論的な速度上昇
αの定式化:
(1)
ここで、
- 要素数
- サイクル数
- 要素平均時間コスト / サイクル
速度上昇
αは以下のファクターで定式化することも可能です:
- 相対的な要素数:(2)
- 相対的な時間ステップ(相対的なサイクル数):(3)
は時間ステップです。
- 相対的なサイクル毎のコスト:(4)
- Lagrangeシェル
- = 1
- Lagrangeソリッド
- = 3
- ALEソリッド
- = 6
- SPHセル
- = 15
速度上昇
αは次のようになります。
(5)
- 経過時間:
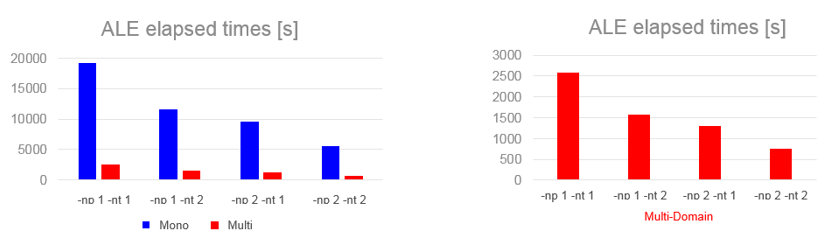
図 5. ALE着水
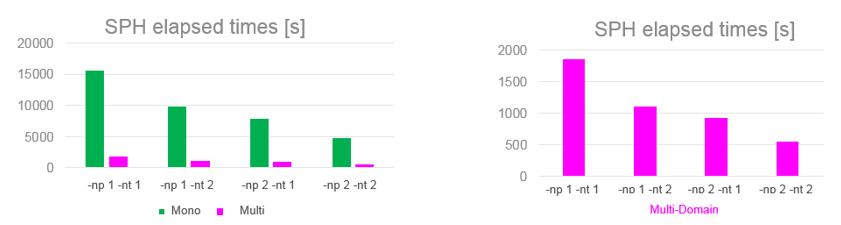
図 6. SPH着水
マルチドメインFSIの速度上昇は、シミュレーションで使用されるコアの数に応じて、単一ドメインのそれの6~9倍になります。
まとめ
- ALEまたはSPHを使用するマルチドメインの場合は、流体と構造との間の接触インターフェースを最小化する必要はありません。
- マルチドメインFSIの場合、メインドメインの流体、およびスケーリングファクターが0.5の要素自由時間ステップ(ALEの場合)を持つ定義された/DT/ALEを使用することを推奨します。Lagrangeサブドメインでは、スケーリングファクターが0.9の節点時間ステップ/DT/NODAを使用する必要があります。
- Lagrangeパートをタイド接触インターフェースTYPE2を用いてアセンブルした場合、Spotflag = 27を使用して運動条件定式化からペナルティ定式化に切り替えると速度上昇の向上が図られ問題が解決されます。