RD-E:1601 陽解法ソルバー
ダミーが準-静的荷重の取り扱いを用いて重力を通して着座されます。
この検討のトピックは運動学的緩和、動的緩和と Rayleigh 減衰を用いた準-静的荷重の取り扱いに関するものです。陽解法で用意されている3つの異なるアプローチが比較され分析されます。
使用されるオプションとキーワード
- シェル、ソリッド、ビーム、ダミー
- 陽解法による準-静的解析、運動学的緩和と動的緩和(/KERELおよび/DYREL)、Rayleigh減衰(/DAMP)
- 対称インターフェース(/INTER/TYPE7)
- Kelvin-Voigt 粘弾性モデル(/MAT/LAW35 (FOAM_VISC))、線形弾性則(/MAT/LAW1 (ELAST))
- 付加質量(/ADMAS)
- 境界条件(/BCS)
- 重力(/GRAV)
- 材料定義(材料)
- 剛体(/RBODY)
目標は、静的つり合いを得るための準-静的アプローチを用いてダミーをシート上にセットすることです。ポジショニングのフェーズはこの検討には含まれていません。このように、ダミーの全ての節点は、ダミーの初期形状を維持するために全体の剛体内に置かれます。
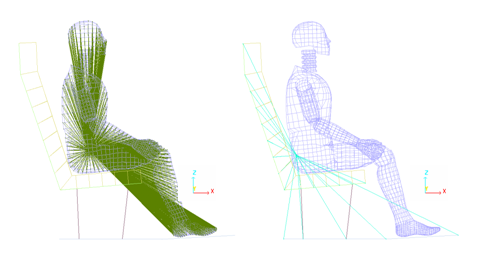
図 1. 両方の剛体のセットアップ
シートの剛体のICoGフラグが1にセットされたとき、重心はメイン節点とセカンダリ節点の座標から計算され、メイン節点は重心位置に移動されて質量と慣性が置かれます。
ダミーの剛体のICoGフラグが3にセットされたとき、重心はユーザー定義のメイン節点座標に設定されます。付加質量と付加慣性はメイン節点座標に伝達されます。
メイン節点の座標とスキュー座標は下の剛体の腰のパートから取り出されています。
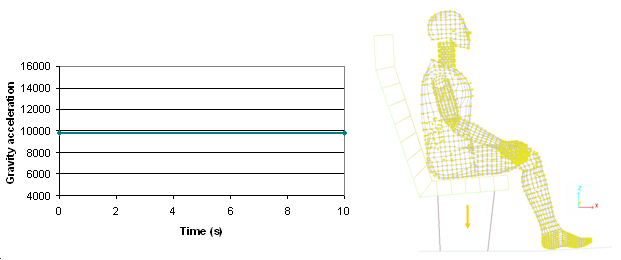
図 2. 入力の重力関数(-9810 mm/s-2)と節点選択(黄色)
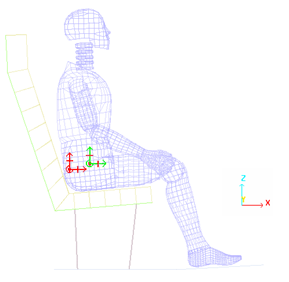
図 3. 剛体のメイン節点上の拘束条件
静的解析:静的つり合いまでの重力荷重の準-静的取り扱い
陽解法積分スキームは節点加速度の計算から始まります。これは動的荷重をシミュレートするには効率的です。しかしながら、動的解法を通した準-静的シミュレーションでは静的つり合いに収束させるため動的効果の最小化が必要になります。これは通常、動的解析前のプレロードの場合を記述します。このように、モデルへの重力荷重の準-静的解は過渡応答の定常解部分になります。
- 運動緩和(/KEREL)
- 動的緩和(/DYREL)
- Rayleigh減衰(/DAMP)
運動学的緩和法
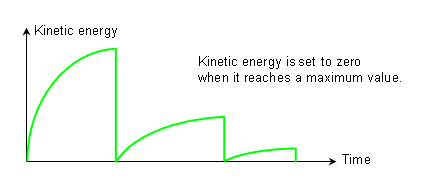
図 4. /KERELオプションでの運動学的緩和法(エネルギー離散緩和とも呼ばれます)
動的緩和法
- 緩和の値(推奨のデフォルト値は1)
- 減衰される期間(系の最長期間以下)
このオプションは、Engineファイル(*_0001.rad)で/DYRELを使用してアクティブ化されます。(入力: および)。
Rayleigh減衰法
ここでとは事前定義の定数です。
- 系の番目の減衰比
- 系の番目の固有振動数

図 5. Rayleighタイプの減衰
多くの周波数がある場合は、計算された値との平均値を用いることができます。
比例減衰のモデルは複雑な構造には非推奨で、実験の良い再現ができません。
このオプションは、Engineファイル(*_0001.rad)で/DAMPを使用してアクティブ化されます(入力: および)。
用いられたパラメータ
- 最初のケース: = 10 および = 10
- 2番目のケース: = 0 および = 10
- 3番目のケース: = 10 および = 0
- 4番目のケース = 20 および = 0
- 最初のケース
- [C] = 10[M] + 10[K]
- 2番目のケース
- [C] = 10[K]
- 3番目のケース
- [C] = 10[M]
- 4番目のケース
- [C] = 20[M]
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
モデル概要
この例題の目的は、動的衝突シミュレーションの前に準-静的アプローチを使用し、重力場の下でダミーをフォームのシートに位置させることにあります。
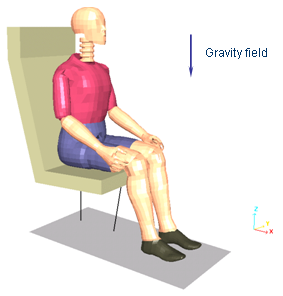
図 6. 検討された問題
ダミー重量は80 kg (173.4 lbs.)です。導入された材料は物理的な場合を表すものではありませんが、ダミーの全重量は尊重されています。この荷重フェーズではダミーの変形は無視できるため、材料特性の単純化はシミュレーションに影響しません。
- 材料特性
- ヤング率
- 210000
- ポアソン比
- 0.3
- 密度
- 7.8 x 10-9 Gkg/l
- 面積
- 2580 mm2
- 慣性
- IXX = 554975 mm4
- 補強材の板厚
- 2 mm
- フロアの板厚
- 1 mm
- 材料特性
- ヤング率
- 0.2
- ポアソン比
- 0
- 密度
- 4.3 x 10-11 Gkg/l
- E1およびE2
- 0
- 接線率
- 0.25
- 純せん断の粘性
- 10000 MPa/s
- C1 = C2 = C3 = 1
- 粘弾性体積粘性
| 圧縮 | -100000 | -10 | 0 | 3000 | 209000 | 210000 |
| 圧力 | -1000 | -1000 | 0 | 7.633 | 7.633 | 18.5 |
粘弾性フォーム材料則(/MAT/LAW35):
Navierの方程式に基づき、LAW35は粘弾性挙動を持つ材料を記述します。内部の空気の効果は別の圧力と圧縮の関数を通して考慮されます。緩和とクリープをモデル化することができます。
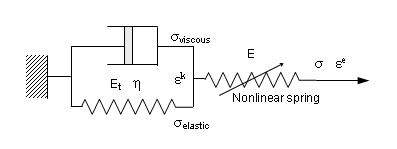
図 7. 一般化Kelvin-Voigtモデル - LAW35
係数の詳細については、Radioss Theory Manualをご参照ください。
- 右記の時刻における密度;
- 初期密度
モデリング手法
- 38つのパートで構成されるダミー(胴体とジョイント)
- 6つのパートから成るシート(フォームのシートバック、フォームのシートクッション、シートバックブレース、シートボトムブレース、シートコラムとフロア)
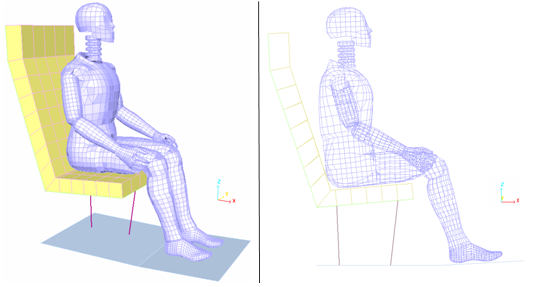
図 8. 左図:モデルのメッシュ(透視ビュー – 陰影表示); 右: モデルのメッシュ(外形ビュー – エッジ表示)
- 2次体積粘性
- 1.1
- 線形体積粘性
- 0.05
- アワグラス粘性係数
- 0.1
ダミーとシートブレースはシェル要素でモデル化され、4871個の4節点シェルと203個の3節点シェルに分割されます (ダミー: 5004シェル、シート: 70シェル)。
- シェルプロパティ
- Belytschkoアワグラス定式化
- アワグラス TYPE4、Ishell = 4
- 膜アワグラス係数
- 0.01(デフォルト値)
- 面外アワグラス
- 0.01(デフォルト値)
- 回転アワグラス係数
- 0.01(デフォルト値)
- 1つ目のインターフェース
- ダミーパート
- セカンダリ節点
- シート
- メインサーフェス
- 2つ目のインターフェース
- ダミーパート
- メインサーフェス
- シート
- セカンダリ節点
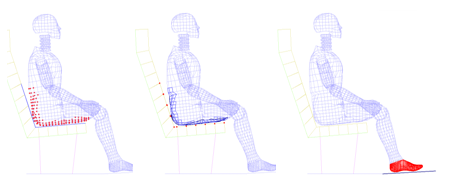
図 9. TYPE7対称インターフェースでの接触のモデル化
対称インターフェース間のギャップは5 mm、他のインターフェースのギャップは0.5 mm が設定されます。
- 対称インターフェースの特性
- Coulomb摩擦(Fricフラグ)
- 0.3
- 臨界減衰係数(Viscフラグ)
- 0.05
- 剛性のスケールファクター(Stfacフラグ)
- 1
- ソーティングファクター(Bumultフラグ)
- 0.20
TYPE7インターフェース定義の詳細については、Radioss Theory ManualおよびStarter入力をご参照ください。
結果
運動学的緩和を用いて得られたカーブとアニメーション結果: /KEREL
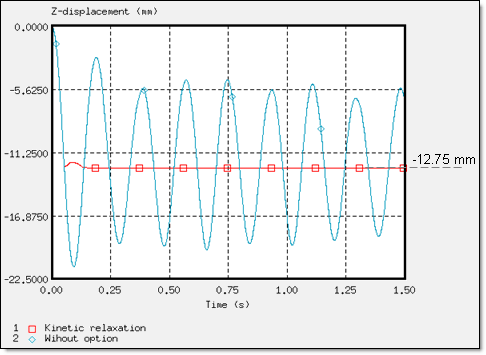
図 10. ダミーの剛体のメイン節点のZ-方向変位(節点14199)
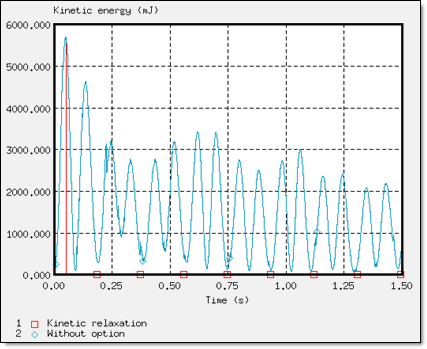
図 11. 全体モデルの運動エネルギー
動的緩和を用いて得られた結果: /DYREL
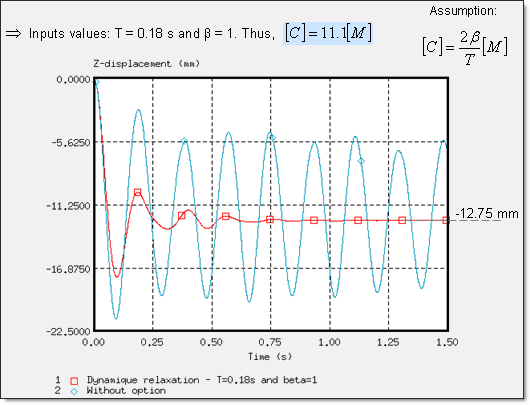
図 12. ダミーの剛体のメイン節点のZ-方向変位(節点14199)
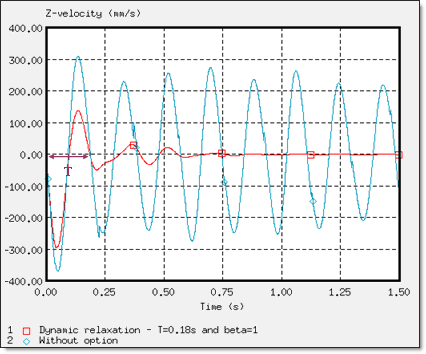
図 13. ダミーの剛体のメイン節点のZ-方向速度(節点14199)
必要な周期Tは速度曲線から推定されます(最長周期)。
Rayleigh減衰を用いて得られた結果: /DAMP
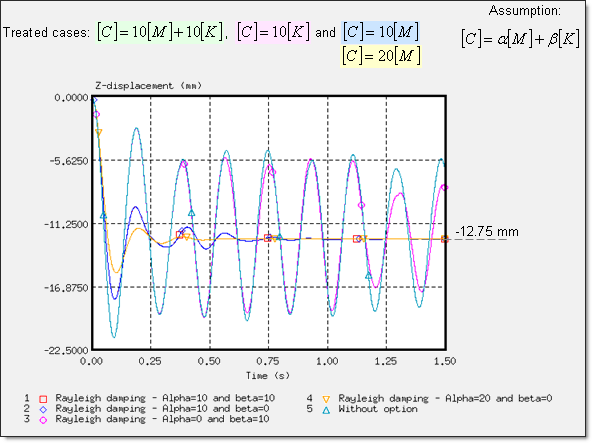
図 14. ダミーの剛体のメイン節点のZ-方向変位(節点14199)
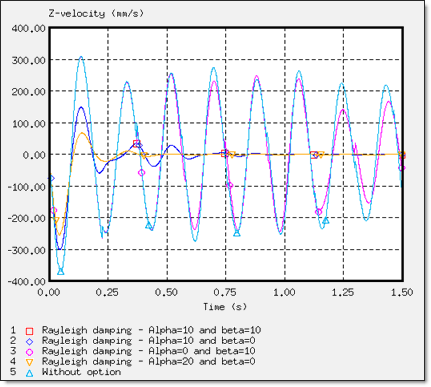
図 15. ダミーの剛体のメイン節点のZ-方向速度(節点14199)
異なるアプローチの比較
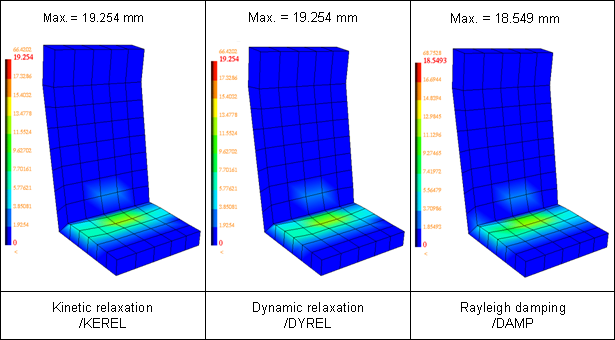
図 16. 時刻t = 1.48 sでのシートの節点変位表示の比較
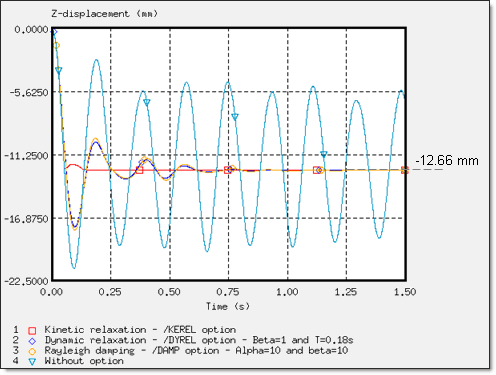
図 17. 3つの静的アプローチを用いて得られた変位の減衰の比較. (ダミーの剛体のメイン節点のZ-方向変位: 節点14199)
まとめ
静的つり合いの収束に用いられる減衰の手法が正確な結果をもたらすことは明白で、特にこの問題の場合では、シートの低い剛性で振動は急速に小さく減少しています。
/KERELで導入される運動学的緩和は、加えて入力データが必要ないために簡単で、静的解に向けての速い収束で相対的に有効でした。安定解が0.137 sで得られています。
/DYRELと/DAMPオプションは粘性減衰に基づき、どちらも3回の振動で収束する同じ応答を導いています。安定解が0.75 sで得られています。その上、この問題では、シートクッションの剛性が低く(ヤング率が0.2 )、Rayleighの仮定の質量と剛性の間のバランスが崩されるため、動的緩和とRayleigh減衰法が基本的に等価になっています。加えて、モデルに与えられた境界条件と荷重が卓越した固有周波数で記述できる問題にしています。このため、1つのパラメータだけがこの問題を記述するのには必要で、これは動的緩和の仮定に帰着します。
- 動的緩和:
- レイリー減衰:
10[M]
Radiossで利用可能なアプローチは、1つの解に収束した後で、ダミーの変位はZ軸方向に-12.66 mmで同じシートクッションの変形が得られています。