RD-E:1602 陰解法ソルバー
ダミーが陰解法アプローチ(静的)により重力を通して着座されます。
- 無条件安定スキーム
- 大きなステップ
- 静的問題の取り扱い
使用されるオプションとキーワード
- シェル、ソリッド、ビーム、スプリング、ダミー
- 陰解法ソルバーによる線形および非線形静的解析
- 対称インターフェース(/INTER/TYPE7)およびタイドインターフェース(/INTER/TYPE2)
- Kelvin-Voigt 粘弾性モデル(/MAT/LAW35 (FOAM_VISC))、線形弾性則(/MAT/LAW1 (ELAST))
- 集中荷重(/CLOAD)
- 強制変位(/IMPDISP)
- 陰解法解析の時間ステップコントロール法(陰解法時間ステップ)
- 陰解法解析の初期時間ステップ(/IMPL/DTINI)
- 陰解法静的線形解析(/IMPL/LINEAR)
- 陰解法静的非線形解析(/IMPL/NONLIN)
- 陰解法解析の出力頻度(/IMPL/PRINT/LINEAR)
- 陰解法ソルバーの解法(/IMPL/SOLVER)
- 重力(/GRAV)
入力ファイル
必要なモデルファイルのダウンロードについては、モデルファイルへのアクセスを参照してください。
線形および非線形解析
ただし、陰解法アルゴリズムはグローバルな解法を用い、それぞれの時間ステップで収束計算を必要として陽解法に比べてロバスト性は低くなります(0ピボット、高い非線形性での発散など)。
- Newmark
- 陰解法積分スキーム
このスキームは無条件安定で、安定条件は時間ステップの選択から独立になります。Newmark法スキームの詳細については、Radioss Theory Manualをご参照ください。
Radiossは線形と非線形のソルバーを擁しています。静解析のみが利用可能で、非線形解析に対して荷重は単調増加の時間の関数として定義する必要があります。
- Cholesky(直接法線形ソルバー)
- 前処理付共役勾配法(線形ソルバー)
- 修正Newton-Raphson法(非線形ソルバー)
- 前処理なし
- 対角Jacobi
- 不完全Cholesky分解
- 安定化された不完全Cholesky分解
- 分解された近似逆行列(デフォルト)
収束判定基準と終了の基準を線形と非線形ソルバー(残差)で定義する必要があります。
- 剛性マトリックスを更新する反復回数の上限
- 時間ステップ増加のために収束反復回数
- 時間ステップ減少のために収束反復回数
- 時間ステップ増加係数
- 時間ステップ減少係数
- 最小タイムステップ
- 最大時間ステップ
- 初期時間ステップ
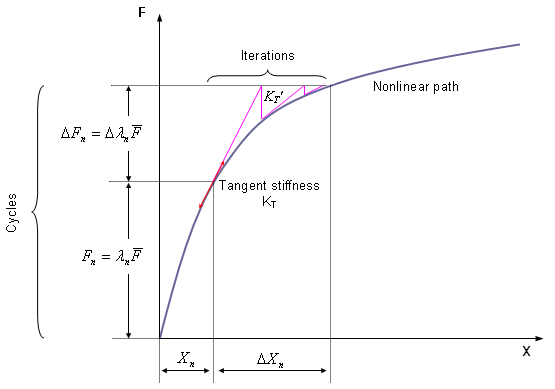
図 1. 荷重制御テクニックの場合のNewton-Raphson法の求解
修正Newton-Raphson法は接線行列を全ての反復で維持したままで、収束性の加速のためにラインサーチ加速テクニックと組み合わせることができます。
- 変位ノルムコントロール
- 孤長コントロール
自動時間ステップコントロールが用いられます。
静解析と陰解法オプション
- 線形静解析計算(重力荷重)
- 非線形静解析計算(強制変位によるダミーのポジショニング、続く集中荷重と重力荷重の3つの計算が実行されます)。
それぞれの解析で適応したモデリングの方法が設定されます:考慮される計算によって異なるインターフェースでの接触と材料が更新されます。
この解析の目標は、異なる荷重ケースに対するモデリングの方法論を、陰解法ストラテジーでの特定の入力データで提案することです。強制変位を用いた静的陰解法と非線形陰解法の検討は、物理的アプローチが異なるために、陽解法で得られた結果と最早比較できません。比較は、重力によるポジショニングのみが意味のあることになります。
モデル概要
線形静解析
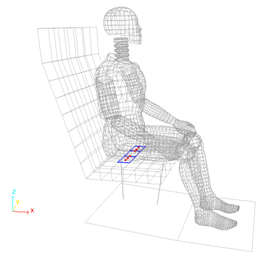
図 2. ダミー / シートクッションモデル化のためのTYPE2タイドインターフェース線形接触
- 材料特性
- ヤング率
- 0.2
- ポアソン比
- 0
- 密度
- 4.3 x 10-11 k g/l
モデリング手法
シェル要素にBATOZ定式化を、ソリッド要素に2x2x2積分点を用いたHA8定式化を使用することができます。
- 陰解法タイプ
- 静的線形
- 線形ソルバー
- 直接Cholesky
- 前処理法
- 分解された近似逆行列
- 終了基準
- 前処理したマトリックスの相対残差
- 収束判定基準
- 10-6
- /IMPL/PRINT/LINEAR/-1
- 線形反復の出力間隔
- /IMPL/SOLVER/3
- ソルバー法
- 5 0 3 0.0
- /IMPL/LINEAR
- 線形系解析の計算
結果
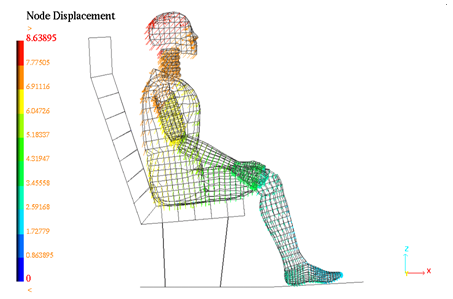
図 3. 重力荷重での線形静的陰解法の解(TYPE2インターフェースを使用)
| 陽解法ソルバー - /DYREL | 陰解法ソルバー - 線形 | |
|---|---|---|
| 正規化されたCPU | 170 | 1 |
非線形性解析
強制変位を用いたポジショニング
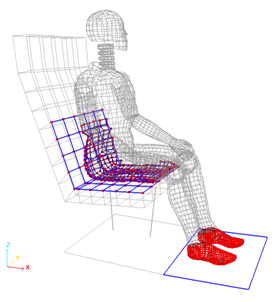
図 4. セルフ接触TYPE7インターフェースでの非線形接触のモデル化
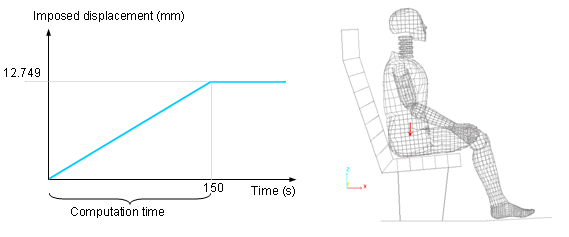
図 5. Z軸方向の単調増加時間関数としての強制変位
- 陰解法タイプ
- 静的非線形
- 非線形ソルバー
- 修正Newton
- 終了基準
- 力の相対残差
- 収束判定基準
- 0.01
- 剛性マトリックスの更新
- 最大5回の反復
- 時間ステップコントロール法
- 弧長増分法と”ラインサーチ”
- 初期時間ステップ
- 5 s
- 最小時間ステップ
- 0.01 s
- 最大時間ステップ
- なし
- 望ましい収束の反復回数
- 6
- 収束の最大反復回数
- 20
- 時間ステップ減少係数
- 0.8
- 最大時間ステップ増加係数
- 1.1
- 孤長
- 自動計算
- スプリングバックオプション
- なし
陰解法のパラメーターはEngineファイルに/IMPLで始まるオプションとして設定されます。
- /IMPL/PRINT/NONLIN/-1
- 非線形反復の出力間隔
- /IMPL/SOLVER/3 5 0 3 0.0
- ソルバー法(Ax=bを解く)
- /IMPL/NONLIN 5 2 0.01
- 非線形静解析の計算
- /IMPL/DTINI 1
- 初期荷重時増分を決める初期時間ステップ
- /IMPL/DT/STOP 1e-3 0
- 時間ステップの最小と最大値
- /IMPL/DT/2 6.0 20 0.8 1.1
- 時間ステップコントロール法 2 – 孤長増分 + ラインサーチが収束の加速と制御のために用いられます
接触問題のため、収束判定基準値(Tol)は10-2(デフォルト値 = 10-3)に設定されます。
いくつかのオプションは陰解法ソルバーと適合しません。陰解法オプションの詳細についてはRadiossStarter入力をご参照ください。
結果
最後のアニメーションが静解析の解に対応します。
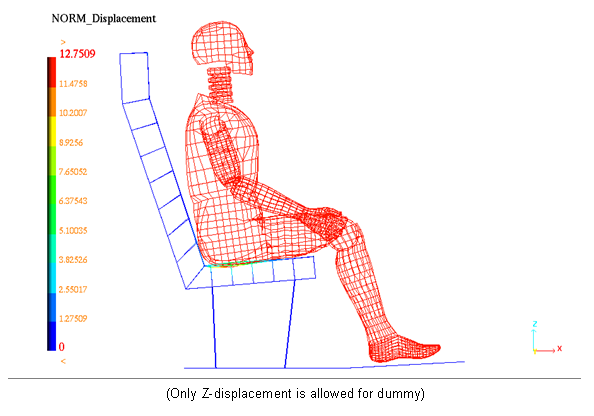
図 6. 強制変位での非線形静的陰解法解
| 解法ソルバー - /DYREL | 陰解法ソルバー - 非線形 | |
|---|---|---|
| 正規化されたCPU | 1.26 | 1 |
| サイクル数 (正規化) | 56704 (1718) | 33 (1) |
集中荷重を用いたポジショニング
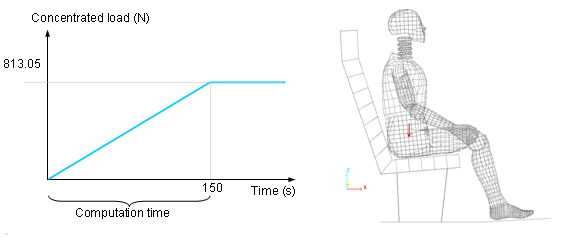
図 7. Z軸方向の単調増加時間関数としての集中荷重
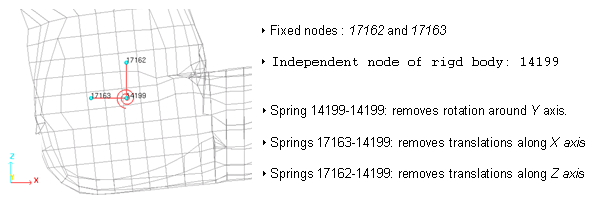
図 8. 陰解法計算の間の剛体モード除去のために定義されたスプリングTYPE8
- 線形弾性挙動
- 質量 = 1g
- 慣性 = 0.001
- 並進剛性: TX = 1 N/mm
TY = 1 N/mm
TZ = 1 N/mm
- 回転剛: RX = 100 Mg.mm2/(s2.rad)
RY = 100 Mg.mm2/(s2.rad)
RZ = 100 Mg.mm2/(s2.rad)
陰解法オプションは、初期時間ステップが次の様に設定された他は前の陰解法問題と同じです: 2秒。
結果
| 解法ソルバー - /DYREL | 陰解法ソルバー - 非線形 | |
|---|---|---|
| 正規化されたCPU | 3.07 | 1 |
| サイクル数 (正規化) | 56704 (1090) | 52 (1) |
| Z方向変位(メイン節点ダミー) | -12.75 mm | -12.49 mm |
重力荷重を用いたポジショニング
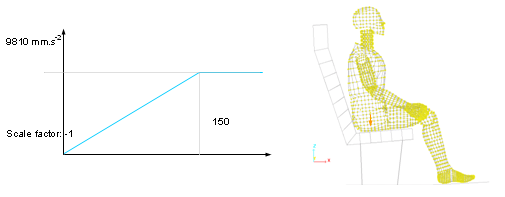
図 9. 単調増加の時間関数としての重力荷重
陰解法オプションは前の陰解法問題と同じです(初期時間ステップは2秒に設定)。
結果
| 解法ソルバー - /DYREL | 陰解法ソルバー - 非線形 | |
|---|---|---|
| 正規化されたCPU | 2.53 | 1 |
| サイクル数 (正規化) | 56704 (1090) | 52 (1) |
| Z方向変位(メイン節点ダミー) | -12.75 mm | -12.42 mm |
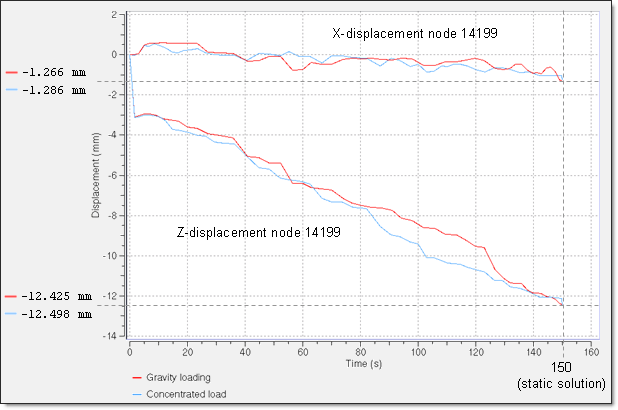
図 10. メイン節点14199(ダミーの剛体)のXとZ方向変位の収束の結果. (重力荷重と集中荷重を用いた陰解法モデル)
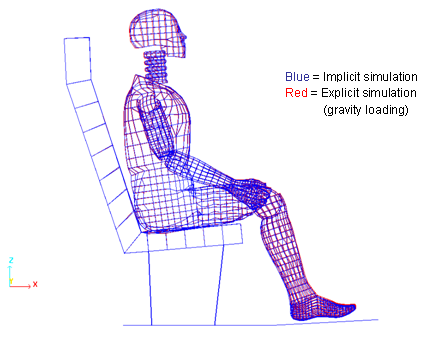
図 11. ダミーの最終位置. 陰解法(重力荷重を用いたモデル)と陽解法(重力荷重と運動学的緩和を用いたモデル)
まとめ
この例題は準-静的問題へのRadioss陰解法ソルバーの使用について焦点を当てました。これに対して、陽解法ソルバーが準-静的問題に適用された時は、異なる収束加速テクニックについて示しています。方法の長所と短所が比較されています。