SET_GSE_ALGEBRAIC_EQN
SET_GSE_ ALGEBRAIC_EQNサブルーチンは、陰的代数方程式を指定するためにGSESUBと組み合わせて使用します。
使用
GSEのセットアップユーティリティサブルーチン。
フォーマット
- Fortranの呼出し構文
- SET_GSE_ALGEBRAIC_EQN (gse_id, eqn_idx, errflag)
- C/C++の呼出し構文
- c_set_gse_algebraic_eqn (gse_id, eqn_idx, errflag);
- Pythonの呼出し構文
- py_set_gse_algebraic_eqn(gse_id, eqn_idx, errflag)
属性
- gse_id
- [整数]
- eqn_idx
- [整数]
出力
- errflag
- [整数]
コメント
- すべてのインデックスが1ベースです。つまり、インデックスは0ではなく1から始まります。
- SET_GSE_ALGEBRAIC_EQNは、iflag=1の場合にのみ呼び出す必要があります。
- ほとんどの場合、GSEは次の形式になります:
(1) 
ただし、場合によっては、状態方程式に微分方程式と代数方程式の両方が関与することもあります。以下に例を挙げます:(2) 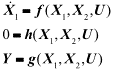
これが生じた場合、SET_GSE_ ALGEBRAIC_EQNを使用して、MotionSolveに代数状態X2に関連付けられた代数方程式の方程式インデックスを伝える必要があります。例えば、以下を呼び出します: SET_GSE_ALGEBRAIC_EQN (gse_id, 2, errflag)
- SET_GSE_ ALGEBRAIC_EQNの一般的なユースケースは、陰的形式の状態方程式:
(3) 
をMotionSolveで解くことが可能な陽的形式に変換するというものです。例えば、次のように定義します:(4) 
陰的形式は、次の微分代数方程式に変換できます:(5) 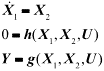
これは、以前の備考で示したものと同じDAE形式です。