Friction
Model ElementFriction要素は、モデル内の特定のジョイントのジョイント摩擦を指定するために使用します。摩擦は、回転、球、並進、円筒、およびユニバーサルのタイプのジョイントでのみサポートされます。MotionSolveは、摩擦にLuGre(Lundt-Grenoble)モデルを使用します。
クラス名
Friction
説明
LuGreモデルは、いくつかの異なる効果を表すことができます:
- 動摩擦
- 静摩擦(スティクション)
- あわせ面が潤滑剤によって押し分けられる効果
- ストライベック効果(非常に低速の場合)。部分的に流体の潤滑剤が存在する場合、あわせ面間の接触が減少し、これによりスティクションの状態から摩擦が指数関数的に減少します。
- 速度依存の摩擦現象(変化する最大静止摩擦力や摩擦遅延など)
- モデルについては、MotionSolveリファレンスマニュアルに詳しく記載されています。
属性の概要
Inputs = "PRELOAD NONE ALL REACTION_FORCE BENDING_MOMENT TORSIONAL_MOMENT"
Effect = "ALL STICTION SLIDING"
Overlaps = "INCREASE DECREASE CONSTANT"| 名前 | プロパティ | コマンドで変更可能か | 設計可能か |
|---|---|---|---|
| id | Int () | ||
| label | Str () | ○ | |
| joint | Reference (Joint) | ||
| mu_static | Double (0.3) | ○ | FDのみ |
| mu_dynamic | Double (0.2) | ○ | FDのみ |
| inactive | Enum ("NONE STATIC", default="NONE") | ||
| stiction_transition_velocity | Double (0.1) | ○ | FDのみ |
| max_stiction_deformation | Double (0.01) | ○ | FDのみ |
| effect | Enum (Effect, default="ALL") | ○ | |
| input_forces | EnumStr (Inputs, count=0, default="ALL") | ○ | |
| # 並進 | |||
| friction_force_preload | Double (0.0) | ○ | FDのみ |
| reaction_arm | Double (1.0) | ○ | FDのみ |
| initial_overlap | Double (1000.0) | ○ | FDのみ |
| overlap_delta | Enum (Overlaps, default="CONSTANT") | ○ | |
| # 回転 | |||
| friction_torque_preload | Double (0.0) | ○ | FDのみ |
| friction_arm | Double (1.0) | ○ | FDのみ |
| pin_radius | Double (1.0) | ○ | FDのみ |
| bending_reaction_arm | Double (1.0) | ○ | FDのみ |
| # ユニバーサル | |||
| yoke | Enum ("I J") | ○ | |
| # 球 | |||
| ball_radius | Double (1.0) | ○ | FDのみ |
| # 効果: | |||
| bristle_stiffness | Double (100.0) | ○ | FDのみ |
| damping_effects | Double (0.316) | ○ | FDのみ |
| viscous_effects | Double (0.0004) | ○ | FDのみ |
使用法
Friction (joint=objJoint, optional_arguments)属性
すべてのジョイントに共通の属性
- id
- 整数
- label
- 文字列
- joint
- モデル内の既存のジョイントへの参照。
- mu_static
- 倍精度
- mu_dynamic
- 倍精度
- max_stiction_deformation
- 倍精度
- stiction_transition_velocity
- 倍精度
- effect
- 文字列
- inputs
- 文字列のリスト。
- inactive
- 文字列
- bristle_stiffness
- 倍精度
- damping_effects
- 倍精度
- viscous_effects
- 倍精度
回転ジョイントに固有の属性
- friction_torque_preload
- 倍精度
- friction_arm
- 倍精度
- pin_radius
- 倍精度
- bending_reaction_arm
- 倍精度
球ジョイントに固有の属性
- friction_torque_preload
- 倍精度
- ball_radius
- 倍精度
並進ジョイントに固有の属性
- friction_force_preload
- 倍精度
- reaction_arm
- 倍精度
- initial_overlap
- 倍精度
- overlap_delta
- 文字列
円筒ジョイントに固有の属性
- friction_force_preload
- 倍精度
- friction_torque_preload
- 倍精度
- pin_radius
- 倍精度
- initial_overlap
- 倍精度
- overlap_delta
- 文字列
ユニバーサル / フックジョイントに固有の属性
- friction_torque_preload
- 倍精度
- friction_arm
- 倍精度
- bending_reaction_arm
- 倍精度
- pin_radius
- 倍精度
- yoke
- 文字列
例
- デフォルトプロパティの回転ジョイントrevjt上に摩擦要素を作成します。
jfric = Friction (joint=revjt) - 単振り子を作成して、摩擦を追加し、シミュレーションを実行して、摩擦トルクを表示します。
モデル
from msolve import *
def PendulumWithFriction():
m = Model ()
Units (mass="KILOGRAM", length="MILLIMETER", time="SECOND", force="NEWTON")
Accgrav (jgrav=-9800)
Integrator (error=1e-5)
Output (reqsave=True)
length = Dv (label="Link Length", b=600)
pivot = Point (0,0,0)
pz = pivot + Vector (0,0,1) # along global Z
px = pivot + Vector (1,0,0) # along global X
midpt = Point (length/2,0,0)
mz = midpt + Vector (1,0,0) # along global X
mx = midpt + Vector (0,1,0) # along global Y
ground = Part (ground=True)
# Pendulum Link
pend = Part (mass=1.4702, ip=[44144.717,44144.717,73.5132,0,0,0])
pend.cm = Marker (part=pend, qp=midpt, zp=mz, xp=mx)
# Joint w/ rotation axis = global Z axis
jim = Marker (part=pend, qp=pivot, zp=pz, xp=px)
jjm = Marker (part=ground, qp=pivot, zp=pz, xp=px)
rev = Joint (type="REVOLUTE", i=jim, j=jjm)
# Joint friction
jfric = Friction (joint=rev, mu_static=0.6, mu_dynamic=0.2, effect="ALL", friction_torque_preload=20)
# Requests
m.r1 = Request (type="DISPLACEMENT", i=pend.cm, j=jjm, comment="Pend CM Displacement")
m.r2 = Request (type="VELOCITY", i=pend.cm, j=jjm, comment="Pend CM Velocity")
m.r3 = Request (type="ACCELERATION", i=pend.cm, j=jjm, comment="Pend CM Acceleration")
m.r4 = Request (type="FORCE", i=jim, j=jjm, comment="Reaction forces in Joint")
return m
###############################################################################
## Entry Point ################################################################
###############################################################################
if __name__ == "__main__":
model = PendulumWithFriction()
model.simulate (type="DYNAMICS", end=4, dtout=.01)結果
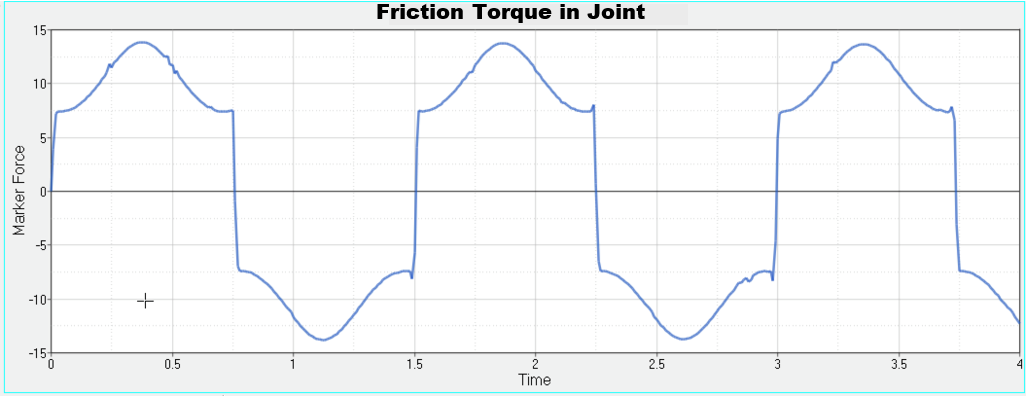
図 1.
コメント
- プロパティの概要、使用理由、および拡張方法については、プロパティをご参照ください。
- Frictionの詳細については、Constraint: Generalをご参照ください。Constraint: General