RBODY
バルクデータエントリ 1つの剛体を要素、節点のセットとして定義します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| RBODY | BID | REFG | |||||||
| TYPE | ID1 | ID2 | ID3 | ID4 | ID5 | ID6 | ID7 | ||
| ID8 | etc. | ||||||||
| TYPE | ID1 | ID2 | ID3 | ID4 | ID5 | ID6 | ID7 | ||
| ID8 | etc. | ||||||||
| MASS | M | ||||||||
| INERTIA | IXX | IXY | IYY | IXZ | IYZ | IZZ | CID | ||
| COG | X | Y | Z |
例1
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| RBODY | 3 | 1245 | |||||||
| GRDSET | 23 | 21 | |||||||
| ELMSET | 9 | 59 | 48 |
例2
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| RBODY | 4 | 3456 | |||||||
| GRDSET | 10 | 11 | 13 | 15 | 22 | 99 | 88 | ||
| 44 | |||||||||
| SURF | 12 | 34 |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| BID | ボディの識別番号。 デフォルトなし(整数 > 0) |
|
| REFG | 参照節点。 6 デフォルト = <COG>(整数 > 0) |
|
| TYPE | 次に続くIDのリストが、このタイプのエンティティを参照することを示すフラグ。
デフォルト値はありません。 |
|
| ID# | 直前のTYPEフィールドのエンティティの識別番号。
デフォルトなし(整数 > 0、または<文字列> ( TYPE = GRDSET or ELMSETのみ) |
|
| MASS | ボディの有限要素質量を上書きするためのフラグ。質量値が次に続くことを示します。 | |
| M | 質量。 (実数 > 0.0) |
|
| INERTIA | ボディの有限要素慣性モーメントを上書きするためのフラグ。慣性モーメントプロパティが次に続くことを示します。 | |
| IXX,IYY,IZZ,IXY,IXZ,IYZ | 慣性モーメント。 IXX、IYY、IZZの場合、実数 > 0.0 IXY、IXZ、IYZの場合、実数 |
|
| CID | 慣性テンソルの方向を定義する座標系識別番号。 CIDがゼロまたは空白の場合は、基準座標系を基準とします。 (整数 ≥ 0または空白) |
|
| COG | ボディの有限要素重心を上書きするためのフラグ。重心情報が次に続くことを示します。 | |
| X, Y, Z | 重心の位置。 (実数) |
コメント
- 少なくとも1つの節点セット(GRDSET)要素セット(ELMSET)またはサーフェス(SURF)を指定する必要があります。
- 1つのRBODYバルクデータエントリ上で定義されているすべての要素、節点、および / またはサーフェスは、1つの剛体を表します。質量プロパティと慣性モーメントプロパティは、継続行で指定された質量(MASS)プロパティと慣性モーメント(INERTIA)プロパティによって上書きされないかぎり、有限要素および質量プロパティによって定義されます。RBODYで質量が定義されていない場合、RBODYが使用されるかどうかに関係なく、モデルの全質量は同じになります。RBODYで質量値が定義されている場合は、RBODYが指定された要素を完全に参照していれば(図 1)、これらの要素の質量はゼロとなり、RBODYの質量値が使用されます。RBODYの質量はCONM2エントリを使用して表されます。場合(TYPE=GRDSET)によっては、特定の要素に対応する節点がすべてRBODY定義に含まれるわけではありません(図 1)。このような状況では、部分的に参照される要素の質量がRBODYに定義されている重量に追加されます。
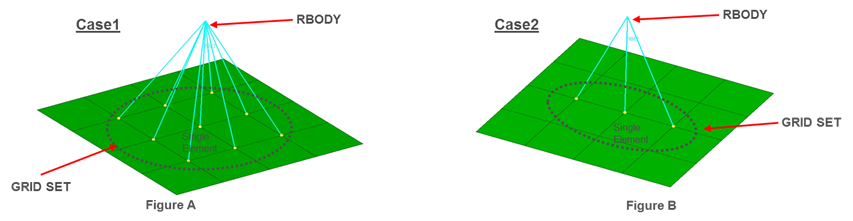
図 1. (A): 完全に参照される要素 / (B): 部分的に参照される要素 - RBODY定義に要素 / 節点 / サーフェス情報が含まれている場合は、質量、慣性モーメント、および重心の入力を省略できます。
- 主慣性モーメントのみを指定する場合、IXX、IYY、IZZはゼロ以外の正の値であり、2つの慣性モーメント値の合計が残った慣性値モーメントより大きい(IXX + IYY > IZZ、IYY+IZZ > IXX、IZZ+IXX > IYY)という条件を満たす必要があります。
- 同じBIDの複数のRBODYエンティティは、RBODY入出力オプションエントリで参照できます。ここでは、独立して移動できる複数のRBODYを選択できます。
- MASS継続行が指定されている場合、REFGまたはCOGが存在する必要があります。MASS継続行に入力されず、REFGもCOGも指定されていない場合は、要素 / 節点 / サーフェス選択のそれぞれの重心が使用されます。
- 文字列ベースのラベルは、他のエンティティにより参照される際などに視認をより迅速にします。詳細については、文字列ラベルベースの入力ファイルをご参照ください。
- HyperMeshでは、このエントリは剛体として表されます。