JOINTG
バルクデータエントリ 2つの節点間のジョイント結合を定義します。
フォーマット
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| JOINTG | JID | JPID | JTYPE | GID1 | CID1 | GID2 | CID2 |
例
| (1) | (2) | (3) | (4) | (5) | (6) | (7) | (8) | (9) | (10) |
|---|---|---|---|---|---|---|---|---|---|
| JOINTG | 2 | 3 | UNIVERSA | 234 | 1 | 2445 | 1 |
定義
| フィールド | 内容 | SI単位の例 |
|---|---|---|
| JID | ジョイント要素識別番号。 デフォルトなし(整数 > 0) |
|
| JPID | PJOINTGのプロパティ識別番号。 デフォルト = 空白(整数 > 0) |
|
| JTYPE | ジョイントのタイプ。 2
結合ジョイント: 並進ジョイントAXIA、INLI、RLIN、CART、INPL、RPINの任意の組み合わせを、回転ジョイントORIE、CARD、ROTAのいずれかと組み合わせて、1つの組み合わせジョイントを作成できます。
注: 必ず並進ジョイントを最初に記述し、その後に回転ジョイントを記述する必要があります(以下に例と表で示しています)。
デフォルト値はありません。 |
|
| GID1 | 最初の節点の節点識別番号。 デフォルトなし(整数 > 0) |
|
| CID1 | 最初の節点GID1の座標系識別番号。 デフォルト = 空白(整数 > 0) |
|
| GID2 | 2つ目の節点の節点識別番号。 デフォルトなし(整数 > 0) |
|
| CID2 | 2つ目の節点GID2の座標系識別番号。 デフォルト = 空白(整数 > 0) |
コメント
- JOINTG要素識別番号は、OptiStruct内のその他の要素に対して一意である必要があります。
- 次の表では、現在サポートされているモーション(MOTNJG)、荷重(LOADJG)、停止 / ロック(PJOINTG)自由度に関する情報を提供しています。
ジョイントタイプ モーション(MOTNJG) 荷重(LOADJG) 停止 / ロック(PJOINTG) 拘束自由度 弾性(PJOINTG) 剛性(PJOINTG) 減衰(PJOINTG) CREF (PJOINTG) CID1 CID2 AXIAL 1 1 1 1 1 YES YES NO NO BALL 2.a/2.b 123 YES NO NO RPIN 2.a2.b 123 YES YES NO CARTESIA 123 123 123 123 YES* YES YES NO INLINE 1 1 23 YES YES NO INPLANE 23 1 YES YES NO CARDAN 456 YES YES NO ORIENT 456 YES YES YES REVOLUTE 4 4 56 YES YES YES UNIVERSA 5(ねじれ) YES YES YES HINGE2.d 4 4 12356 4(ELASのみ) YES YES YES YES RLINK 1(AXIAL) YES NO NO RBEAM 123456 YES NO NO UJOINT 1235 YES YES YES CYLINDRI 14 14 14 2356 14 14 YES YES YES YES TRANSLAT 1 1 1 23456 1 1 YES* YES YES YES ROTATION 456 456 456 456 456 YES* YES YES NO 組み合わせジョイントの例 2.e AXIAORIE 1 1 1 456 1 1 YES* YES YES YES INLICARD 1456 1 23 YES YES YES RLINORIE 1(軸)456 YES YES YES CARTROTA 123456 123456 123456 123456 123456 YES* YES YES NO INPLORIE 23 23 23 1456 23 23 YES* YES YES YES CARTORIE 123 123 456 123 123 YES* YES YES YES RPINROTA 456 456 456 123 456 456 YES* YES YES NO CARTCARD 123456 123456 123456 123456 123456 YES* YES YES NO *陽解法動解析(NLEXPL)でのみサポートされます。
- BALLジョイントでは、基準座標系で2つの自由度間の相対的な並進はありません。BALLジョイントでは局所座標系を定義しないでください。指定しても使用されません。
- RPINジョイントでは、CID1で定義された局所座標系で節点間の相対的な並進はありません(これが、RPINジョイントとBALLジョイントとの相違点です)。注: ジョイントの節点で定義された局所座標系では、その局所座標系が定義されている節点と共に局所座標系が移動 / 回転します。したがって、基準座標系から見て、RPINジョイントの節点間の相対的な並進があるように見えても、節点GID1と共に移動 / 回転するローカルなCID1内で節点間の相対的な並進はありません。
- 拘束自由度は、互いに相対的な運動が許容されないジョイントの各節点の自由度です。たとえばBALLジョイントにおいて、ジョイントの2つの節点間の自由度123で相対的な運動は許容されません。
- HINGEジョイントのCID2は、LGDISPでのみ、JOINTG節点に一貫性がない場合に限って必須です。
- 上記の表に挙げられている組み合わせジョイントは例です。並進ジョイントAXIA、INLI、RLIN、CART、INPLの任意の組み合わせを、回転ジョイントORIE、CARD、ROTAのいずれかと組み合わせて、1つの組み合わせジョイントを作成できます。必ず並進ジョイントを最初に記述し、その後に回転ジョイントを記述する必要があります(例で示しているとおりです)。
- 陽解法動解析の場合、MOTNJGおよびLOADJGはサポートされていません。STOP/LOCK、DAMP、ELASTICITY、およびRIGIDオプションは、上記にあげた特定のジョイントをサポートします。
- ジョイント定義の詳細については、ユーザーズガイドのJOINTG(コネクター)をご参照ください。
- JOINTGサポート情報:
- JOINTGは、線形静解析、微小変位非線形静解析、大変位非線形静解析、直接法による過渡解析、および慣性リリーフ解析の解析タイプでサポートされています。
- MOTNJG(ゼロおよびゼロ以外の運動)およびLOADJGは、JOINTGがサポートされるすべての関連ジョイントおよび解析タイプでサポートされています(いくつかの例外あり)。線形解析では、運動がゼロのMOTNJGのみがサポートされています。運動がゼロでないMOTNJGは、SMDISPの円筒ジョイントと軸ジョイントでのみサポートされています。LOADJGは、SMDISPの円筒ジョイントと軸ジョイントでのみサポートされています。
- PJOINTGエントリの/LOCKは、LGDISPおよびSMDISPの非線形静解析(NLSTAT)でのみサポートされます。
- STRESSとSTRAINの入出力エントリでそれぞれOPTIファイルフォーマットが選択されている場合、JOINTGの力、変位、反力、粘性減衰力、およびStop/Lockステータスの結果は<filename>.jointファイルに出力されます。H3DファイルフォーマットがSTRESSおよびSTRAINエントリで要求された場合、対応する結果はそれぞれJOINTG ForceおよびJOINTG Disp.、JOINTG Reaction Forces (s)、JOINTG Viscous Forces (s)、およびJOINTG Stop and Lock Status (s)と表示されます。Viscous Damping Forcesは、PJOINTGのPROPERTYフィールドがDAMPに設定されている場合にのみ出力されます。
- JOINTGの自由度が過剰に拘束されている場合は、過剰拘束チェック情報が.outファイルに出力されます。現在のところ、モデルにJOINTGエントリがあって複数の拘束が同じ自由度に適用されている場合にのみ、この情報が得られます。これら複数の強制拘束によってループが発生しますが、現在ではこのループが.outファイルに出力されるので、このような節点を特定できます。図 1では、次のようなループを確認できます。2003 → 9003 → 1003 → 2003
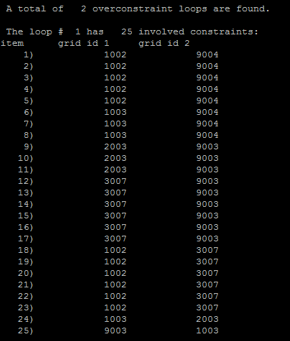
図 1. - JOINTGを使用して定義されるOptiStructジョイントは、OptiStruct-MotionSolve統合を伴うJOINTエントリを使用して定義されるマルチボディダイナミクス(OS-MBD)ジョイントとは異なります。